



Publicado
LOCALIZACIÓN DE BIFURCACIONES DESLIZANTES EN UN OSCILADOR ROTATIVO DE DOBLE LEVA
Palabras clave:
Sistemas no suaves, sistemas de Filippov, bifurcaciones deslizantes, límite de discontinuidad, osciladores, fricción. (es)LOCALIZACIÓN DE BIFURCACIONES DESLIZANTES EN UN OSCILADOR ROTATIVO DE DOBLE LEVA
LOCALIZATION OF SLIDING BIFURCATIONS IN A ROTATIONAL OSCILLATOR WITH DOUBLE CAM
IVAN ARANGO
Departamento de Ingeniería Mecánica, Universidad EAFIT, Medellín, Colombia, iarango@eafit.edu.co
JOHN ALEXANDER TABORDA
Facultad de Ingeniería, Ingeniería Electrónica, Universidad del Magdalena, Santa Marta, Colombia, jtaborda@unimagdalena.edu.co
GERARD OLIVAR
Departamento de Ingeniería Eléctrica, Electrónica y Computación, Universidad Nacional de Colombia Sede Manizales, golivart@unal.edu.co
Recibido para revisar julio 23 de 2009, aceptado septiembre 22 de 2010 , versión final octubre 7 de 2010
RESUMEN: En este trabajo se analizan las bifurcaciones no suaves no convencionales también llamadas deslizantes en un sistema con múltiples límites de discontinuidad. El método de seguimiento de puntos singulares (SPT) es probado para localizar las bifurcaciones en un oscilador rotativo de doble leva. Los resultados indican que el método SPT puede ser utilizado para analizar diferentes tipos de sistemas no suaves que presentan dinámicas deslizantes complejas.
PALABRAS CLAVE: Sistemas no suaves, sistemas de Filippov, bifurcaciones deslizantes, límite de discontinuidad, osciladores, fricción.
ABSTRACT: In this work, nonsmooth and non-conventional bifurcations, also called sliding bifurcations are analyzed in a system with multiple discontinuity boundaries. The singular point tracking (SPT) method is used to locate bifurcations in a rotational oscillator with double cam. The results indicate that SPT method is useful to analyze different nonsmooth systems with complex sliding dynamics.
KEYWORDS: Nonsmooth systems, sliding bifurcation, Filippov systems, discontinuity boundary, oscillators, friction.
1. INTRODUCCIÓN
Fenómenos como impacto, fricción, histéresis, saturación y conmutación han sido considerados fenómenos no suaves. El comportamiento de las dinámicas y sus bifurcaciones en sistemas no suaves se han estudiado intensivamente en los últimos años [1], [2], [3], [4], [5]. La no suavidad está asociada a las discontinuidades que se presentan en las variables de estado o en sus derivadas.
Desde el año 2000 los sistemas no suaves han sido clasificados de acuerdo al grado de discontinuidad de las órbitas y de los campos vectoriales [6]. En cada clase se han generado trabajos teóricos y empíricos para mejorar su conocimiento. En la primera clase se incluyen sistemas cuyo campo vectorial f es continuo y tiene discontinuidades en su primera derivada o en derivadas de mayor orden. Un ejemplo es el sistema Masa Resorte Amortiguador con topes elásticos en uno, o ambos extremos de su carrera [6]. En la segunda clase se incluyen los sistemas descritos por ecuaciones diferenciales con discontinuidad en el lado derecho que también son llamados sistemas de Filippov o deslizantes. El campo vectorial de estos sistemas es discontinuo y es típico por ejemplo de los sistemas con fricción seca [4]. En la tercera clase se incluyen los sistemas con saltos en los valores de las variables de estado. Es típico en los sistemas con topes no elásticos en los que se produce impacto y son modelados suponiendo una deformación despreciable y un tiempo de fenómeno muy corto [1].
Existe un completo juego de herramientas matemáticas para analizar bifurcaciones si el sistema no presenta discontinuidades, es decir, si el sistema es suave. Sin embargo, muchas aplicaciones físicas deben ser modeladas como sistemas dinámicos no suaves. En todos estos casos no se puede aplicar de forma directa la teoría de sistemas suaves, lo cual ha llevado al surgimiento de una nueva teoría, la teoria de sistemas no suaves, encargada de analizar y caracterizar fenómenos inducidos por las discontinuidades [7]. Este trabajo está motivado en la necesidad de analizar sistemas con un número creciente de discontinuidades de forma que los resultados puedan aplicarse a la complejidad de los sistemas reales. Los dos métodos conocidos para el análisis de bifurcaciones deslizantes [8],[5] están basados en la aplicación de problemas de frontera, pero cuando un sistema presenta varios segmentos deslizantes o es de orden superior a tres, se dificulta la aplicación. Otro método complejo y con varias restricciones usado por di Bernardo et. al. [7],[9], es el mapa de discontinuidad (discontinuity map), el cual tiene muchos problemas de aplicación en sistemas complejos. Recientemente ha sido propuesto el método de seguimiento de puntos singulares SPT [10] [11] [12] [13] [14] que a diferencia de los anteriores se basa en la codificación de la información disponible en el límite de discontinuidad y su mejor característica es que permite identificar elementos en órbitas complejas que incluyen muchos puntos singulares de diferentes características.
El trabajo se organiza de la siguiente manera. En la Sección 2 se referencian las principales bifurcaciones deslizantes, el método de Filippov y el método de seguimiento de puntos singulares SPT. En la Sección 3 se presenta el modelo del oscilador rotativo de doble leva. En la sección 4 se prueba el método SPT en el modelo para evaluar la utilidad del método en la localización de bifurcaciones deslizantes en sistemas con múltiples límites de discontinuidad. Finalmente, las conclusiones se presentan en la Sección 5.
2. ANTECEDENTES ACERCA DE LOS METODOS Y LAS BIFURCACIONES DESLIZANTES.
Un tipo de bifurcaciones inducidas por discontinuidades y recientemente referenciadas son las llamadas bifurcaciones deslizantes. Cuatro de las bifurcaciones de ciclos límite no suaves de co-dimensión uno son: "Grazing-sliding"[7] o "Touching" [15], "Switching-sliding" [7] o "Bucking" [15] , "Crossing-sliding"[7][15] y "Multi-sliding"[7] o "Adding" [15] . La más importante característica de los sistemas de Filippov es la posibilidad de movimiento restringido en un subconjunto del espacio de estados, en la frontera de discontinuidad. Este movimiento restringido es frecuentemente referido como deslizante [16]. La solución de la dinámica deslizante queda confinada en un entorno del límite de discontinuidad y puede analizarse por medio de dos métodos equivalentes: El método convexo de Filippov [17] y el control equivalente de Utkin [16].
El flujo en los sistemas de Filippov del sistema puede representarse como:
 (1)
(1)
donde fi y fj son funciones vectoriales suficientemente suaves; Zi y Zj son los correspondientes espacios de estado (o zonas de cada f) y α R es el parámetro. Las zonas dependen de la función escalar H(x,α) definida por:
R es el parámetro. Las zonas dependen de la función escalar H(x,α) definida por:
 (2)
(2)
Entre Zi y Zj el sistema tiene el límite de discontinuidad (LD) el cual es asumido como un hiperplano suave. El LD es simbolizado por Σij y descrito por
 (3)
(3)
Cuando se presenta deslizamiento en el LD, el método de Filippov [17] da como solución, una combinación convexa G(x,α) de los vectores fi y fj que son la evaluación de la ecuación (1) en el punto x* Sij. El vector G es calculado como:
Sij. El vector G es calculado como:
 (4)
(4)
Donde ? es un parámetro definido en función de las proyecciones de los campos vectoriales en el vector tangente Ht definido como fit= < Ht , fi >
y fjt= < Ht , fj > donde < . > denota un producto escalar.
 (5)
(5)
Las bifurcaciones de ciclos en los sistemas de Filippov se dan cuando ante el cambio de un parámetro, la trayectoria hace contacto o deja de contactar un sector deslizante en el límite de discontinuidad. El soporte matemático de este tipo de bifurcación está basado en la equivalencia topológica de la órbita propuesta por Kuznetsov [15]. Las bifurcaciones de ciclos pueden clasificarse como locales o globales [15]. Todas las bifurcaciones que involucran ciclos que no se desaparecen son clasificadas como globales.
2.1 Bifurcaciones deslizantes
La secuencia de cambio en los ciclos límites de la bifurcación Grazing (BG) se da cuando la órbita de un ciclo límite ФФ se encuentra enteramente en uno de los campos vectoriales i o j como se presenta en la figura 1a [7]. Ante un cambio de uno de los parámetros de α1 a α2, el ciclo límite crece o se desplaza y un único punto de la órbita hace contacto en un punto Ωs(~) de un segmento deslizante Фs→ o Фs←. El valor del parámetro en el cual se presenta el contacto de un único punto es estrecho, luego ante un pequeño cambio de α2 a α3, la dinámica cambia como se muestra en la figura 1c. La órbita del ciclo límite ahora está formada por dos segmentos; una parte del original y un segmento deslizante Фs→ que va desde el punto de contacto Ωs(~) hasta el extremo Ωs(+) del segmento ya que, como se mencionó, la principal característica de estos es que no permiten que la dinámica abandone el límite de discontinuidad hasta no terminar el segmento deslizante. La secuencia de cambio en los segmentos y puntos en este ciclo es:
 (6)
(6)
Donde Ф simboliza segmentos y Ω puntos,  es el símbolo para indicar el siguiente elemento de un ciclo límite,
es el símbolo para indicar el siguiente elemento de un ciclo límite,  indica que termina el ciclo y que se repiten todos los elementos indefinidamente y / separa la descripción de un ciclo con el siguiente.
indica que termina el ciclo y que se repiten todos los elementos indefinidamente y / separa la descripción de un ciclo con el siguiente.

Figura 1. Bifurcaciónes Grazing, Switching y Crossing.
Figure 1. Grazing, Switching and Crossing bifurcations.
La secuencia de cambios para la bifurcación Switching (BS) se da continuando con el cambio de parámetro α3 a α4, para el cual se ocurre que el ciclo límite continúa haciendo contacto con el segmento deslizante más atrás (es decir, hacia la izquierda) hasta que logra alcanzar el primer punto Ωs(-) de este (ver figura 1d). En ese momento se presenta la bifurcación y con un cambio de parámetro pequeño de α4 a α5, la órbita ahora pasa de tener dos segmentos, a tener tres segmentos y uno de ellos, el Ωij_ Ωs(~) ahora pertenece al otro campo vectorial, el j.
La secuencia de cambio en los segmentos y puntos en este ciclo es:
 (7)
(7)
La secuencia de cambios para la bifurcación Crossing (BC) se da continuando con el cambio de parámetro de α5 a α6, el segmento que evoluciona en la zona Zj hace que el ciclo límite crezca y así contacte el segmento deslizante en puntos cada vez más cercanos de su final. La bifurcación se da cuando el segmento Ωij_Ωs(~) cambia hasta que se convierte en Ωij_Ωs(+), es decir alcanza el último punto del segmento deslizante, tal como se muestra en la figura 1f. Si el parámetro cambia de α6 a α7, el ciclo límite se forma con dos segmentos que no son deslizantes pero que pertenecen a diferentes campos vectoriales. La secuencia de cambio en los segmentos y puntos del ciclo es:
 (8)
(8)
La bifurcación Adding no se presenta en el sistema analizado. Para más información ver referencia [8]
2.2 El Método de seguimiento de puntos singulares (SPT)
El SPT [10] [11] [12] [13] [14] permite identificar 41 puntos singulares que están asociados a los 19 tipos de bifurcaciones locales clasificadas en [15] y también determina los puntos iníciales y la identificación de ciclos en el seguimiento de bifurcaciones globales. Entre ellos, los puntos Ωij, Ωji, Ωs(-) y Ωs(+), que permiten generar mapas en función de un parámetro y determinar sectores de presencia de segmentos deslizantes Фs→ o Фs←. (tal como se ilustra en la figura 5.)
3. MODELO DE OSCILADOR ROTATIVO DE DOBLE LEVA
El modelo a utilizar es una versión ampliada del presentado recientemente por Paolo Casini et. al. en [18]. La presencia de múltiples límites de discontinuidad es debida al contacto de fricción y por la forma de las levas que a su vez produce bifurcaciones deslizantes en la dinámica del sistema.
Este modelo es un oscilador constituido por un disco principal rotativo sujeto a un torque elástico que intenta restituir la posición cero y en contacto con dos discos auxiliares girando a velocidad constante como aparece en el esquema de la figura 2. El disco principal es en si dos levas en donde cada una tiene un ángulo de contacto (α o β) con cada uno de los discos auxiliares. Los ángulos Fi y φi indican la fase de las levas y de los discos auxiliares con respecto al ángulo de referencia θ=0. El sistema queda descrito por la ecuación diferencial
 (9)
(9)
Figura 2. Parámetros del modelo.
Figure 2. Model parameter .
Por facilidades de análisis se hace el siguiente cambio de variables τ=ωnt. La frecuencia natural ωn es igual a ωn=(Kr/J)-0.5, donde Kr es la constante del elemento elástico restitutivo, J es el momento de inercia del disco principal y C es el coeficiente de fricción viscosa de los rodamientos. El coeficiente de amortiguamiento del sistema es ς=C/(JKr)-0.5 y el modelo adimensional es
 (10)
(10)
Donde T es el torque de fricción y f(θ) una función que permite mantener una entrada de energía al sistema en función de las variables de estado, de forma que las órbitas son un ciclo límite dependiente de la amplitud A de esta función.
 (11)
(11)
Los torques de fricción producidos por los discos auxiliares Ti se definen según la ley de fricción de Conti [7]. Ti=RNiUi con R el radio del disco, Ni la fuerza normal que pone en contacto los discos y Ui el coeficiente de fricción.
 (12)
(12)
con
 (13)
(13)
 (14)
(14)
Teniendo dos valores para i en este ejemplo, hay 2i sub-espacios con ecuaciones de segundo orden para describir la dinámica.
 (15)
(15)
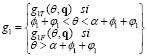
Donde gi(θ,q) es una función discreta que relaciona el perfil de las levas del disco principal y depende del vector de parámetros q (α,β,φ,F) y p (ς).
Los límites de discontinuidad que dependen de la velocidad son:

La validez de los sub-espacios Di son:

Dependiendo del valor de ω en el cual se presenta una vR=0, se estructuran diferentes campos vectoriales como los que se presentan en la figura 3a, 3b y 3c.

Figura 3. Distribución de campos vectoriales de acuerdo a los valores de ω para hacer VR=0.
Figure 3. Distribution of the vector fields according to the values of ω to make VR=0.
Al hacer el análisis más profundo, se tienen en cuenta todos los posibles campos vectoriales producidos por los cambios de las funciones g1(θ,q) y g2(θ,q). Estos nuevos campos, a diferencia de los anteriores, tienen límites de discontinuidad definidos por la posición angular. La función g1(θ,q) es igual a 1 si existe contacto entre la primera leva del disco principal y el disco auxiliar δα. Si no existe contacto, g1(θ,q)=0. De acuerdo a lo anterior:
 (26)
(26)
En una forma similar para g2(θ,q)
 (27)
(27)

Introduciendo (26) y (27) en (16), (17), (18) y (19) resulta que el contacto y no contacto entre discos incrementa el número de campos vectoriales así:

De estas 16 ecuaciones, algunas son equivalentes por lo cual el conjunto se reduce a 9 funciones diferentes.
 (44)
(44)
De acuerdo al valor de los parámetros es posible obtener una división del espacio de estados en entre 3 y 8 campos vectoriales. En la figura 4 se aprecian algunas de las configuración posibles.

Figura 4. Distribución de los campos vectoriales de acuerdo a los valores de ω, α, β, Fi y φi.
Figure 4. Distribution of the fields vector according to the values of ω, α, β, Fi y φi.
4. EJEMPLO.
Para ilustrar la complejidad dinámica de un sistema mecánico relativamente simple, se presenta el ejemplo del oscilador rotacional con las siguientes características: α=171.8871 grados (3.09 rad), β=171.8871 grados (3.0 rad), F1=302.7043 grados (5.2831 rad), F2=246.00 (4.2935 rad), φ1=0, φ2=0. ω1=15 rpm (1.5708 rad/s) ω2=-21 rpm (-2.1991 rad/s), J=0.0548 kgm2, Kr =2.62 Nm/rad, C= 0.05 Nms/rad, Ni=49 N, R=0,12 m y ri = 0,12 m . μsi=0.65, μki=0.35 y pi=15 son los coeficientes para calcular el coeficiente de fricción Ui [18].
Con las anteriores condiciones el diagrama de fase se divide en 8 campos vectoriales como se presenta en la figura 4f y 5b.

Figura 5. a) Mapa  =1.5708 b) Distribución de campos vectoriales A=0.3 c) Mapa
=1.5708 b) Distribución de campos vectoriales A=0.3 c) Mapa  =-2.1991
=-2.1991
Figure 5. a) Map  =1.5708 b) Vector field distribution A=0.3 c) Map
=1.5708 b) Vector field distribution A=0.3 c) Map  =-2.1991
=-2.1991
Determinar los valores de los parámetros en los cuales se presentan bifurcaciones en un sistema complejo usando el método de fuerza bruta demanda un gran esfuerzo computacional, en tiempo y memoria. El método SPT brinda una primera aproximación a su ubicación [12]. En las figura 5a y 5c se presentan los mapas de los segmentos deslizantes Фs→ y Фs← de los cuales se infiere donde comenzar la búsqueda de bifurcaciones. El ejemplo seleccionado adicional a las bifurcaciones deslizantes BG, BS y BC presenta otros tipos que no serán listadas. Se trata de bifurcaciones por cambio de número de campos vectoriales que visita un ciclo límite y las nuevas bifurcaciones presentadas por Casini (exchanging, sticking disappearance and NS Fold Bifucations) [18].
2.3 Bifurcaciones en límite de discontinuidad entre campos vectoriales fv11-fv21, fv12-fv22, fv 21-fv41 y fv23-fv43
Para valores de A inferiores a -0.299 se presentan ciclos límites sin segmentos deslizantes cuyo tamaño depende del parámetro A. El procedimiento seguido por el método SPT para ciclos es iniciar una integración al mismo tiempo que detecta la secuencia y tipo de elementos que presenta la órbita. También al mismo tiempo compara la secuencia de cambios con los patrones dados para cada una de las bifurcaciones BG, BS y BC. A medida que se completan ciclos límites sin bifurcaciones se va incrementando el valor de la variable A hasta que el comparador de cambios de ciclos detecta un cambio que condujo a una bifurcación. En la figura 6 se presenta la órbita de seis de las once bifurcaciones deslizantes presentadas. En la tabla 2 se presentan secuencias de las tres bifurcaciones detectadas en el LD fv11-fv21 y en la tabla 1 los valores del parámetro A donde se dan cada una de todas bifurcaciones.
Figura 6. Orbitas de ciclos límites en los valores donde se presentan las bifurcaciones.
Figure 6. Cycle limit orbits with the values where bifurcation are presented.
Tabla 1. Valores de A en bifurcaciones.
Table 1. A values for biburcations.

Tabla 2. Secuencias de ciclos límites para bifurcaciones en LD fv11-fv21
Table 2. Cycle limit sequences for bifurcations in LD fv11-fv21
En el LD fv23-fv43 en valores de A=2.5 aún no se ha dado la bifurcación Crossing y para valores superiores no existen ciclos límites.
5. CONCLUSIONES
En este trabajo se analizaron las bifurcaciones no suaves no convencionales en un sistema con múltiples límites de discontinuidad. El método de seguimiento de puntos singulares (SPT) demostró que es una herramienta que sirve en la detección de los puntos iníciales de los ciclos y la determinación de los cambios en la secuencias de los ciclos límites. Un oscilador rotativo de doble leva fue el modelo analizado. Los resultados indican que esta es una metodología útil para analizar otros sistemas no suaves complejos.
6. AGRADECIMIENTOS
I. Arango agradece a Latin American and Caribbean Collaborative ICT Research Federation (LACCIR) por el soporte dado a este trabajo.
REFERENCIAS
[1] BROGIATO B. Nonsmooth Mechanics Models, Dynamics and Control. Springer Verlag, New York, 1999.
[2] di BERNARDO M., BUDD C., CHAMPNEYS A.R., KOWALCZYK P., NORDMARK A.B., OLIVAR G. and PIIROINEN P.T. Bifurcations in Nonsmooth Dynamical Systems 50(4), 629-701, 2008.
[3] LEINE R. I and NIJMEIJER H. Dynamics and Bifurcations in Non Smooth Mechanical Systems. Springer Verlag, 2004.
[4] MERILLAS I. Modeling and numerical study of nonsmooth dynamical systems. Applications to mechanical and power electronics systems. [ Ph.D. Thesis]. Calaluña, España: Universidad politecnica de Cataluña. 2007.
[5] PIIROINEN P. and KUZNETSOV Y. An event driven method to simulate Filippov systems with accurate compute of sliding motion. In: ACM Transactions on Mathematical Software,
34(3), ACM New York, NY, 2008
[6] LEINE R. I. Bifurcations in discontinuous mechanical systems of Filippov-type. [ PhD thesis], Eindhoven, Netherlands :Technical University of Eindhoven, 2000.
[7] di BERNARDO M., KOWALCYK M. and NORDMARK A. Bifurcations of dynamical systems with sliding: Derivation of normal-form mappings, Physica D11, 175-205, 2002.
[8] DERCOLE F. and KUZNETSOY Y. SlideCont: An Auto97 Driver for Bifurcation Analysis of Filippov Systems. ACM Transactions on Mathematical Software, 31(1), 95-119, 2005.
[9] KOWALCZYK P. and di BERNARDO M. Two-parameter degenerate sliding bifurcations in Filippov systems, Physica D, 204 , 204-229, 2005.
[10] ARANGO I and TABORDA J.A. Integration-free analysis of nonsmooth local dynamics in planar filippov systems, International Journal of Bifurcation and Chaos, 19(3), 947-975 2009.
[11] ARANGO I. and TABORDA J.A. Continuation of Nonsmooth Bifurcations in Filippov Systems Using Singular Point Tracking, International Journal of Applied Mathematics and Informatics, 1(1), 36-49, 2007.
[12] ARANGO I. and TABORDA J.A. Characteristic Point Sequences in Local and Global Bifurcation Analysis of Filippov Systems, Wseas Transactions on Systems. 7(10), 840-854, 2008.
[13] ARANGO I. and TABORDA J.A. Numerical Analysis of Sliding Dynamics in Three-Dimensional Filippov Systems using SPT Method, International Journal of Mathematical Models and Methods in Applied Sciences. 2(1), 342-354, 2008.
[14] ARANGO I. and TABORDA J.A. Sptcont 1.0: A Labview toolbox for bifurcation analysis of Filippov systems, Proceedings of the 12th WSEAS International Conference on Systems, Heraklion, Greece, 587-595, 2008.
[15] KUZNETSOV Y., RINALDI S. and GRAGNANI A. One-parameter bifurcations in planar Filippov systems., International Journal of Bifurcations and Chaos, 13 (8), 2157-2188, 2003.
[16] UTKIN V.I. Sliding Modes in Control and Optimization. Communications and Control Engineering, Springer - Verlag, Berlin, 1992.
[17] FILIPPOV A.F. Differential Equations with Discontinuous Righthand Sides. Kluwer Academic Publishers , Dortrecht, 1988.
[18] CASINI P., GIANNINI O. and VESTRONI F. Experimental evidence of non-standard bifurcations in non-smooth oscillator dynamics, Nonlinear Dyn , 46, 259-272, 2006.
Cómo citar
IEEE
ACM
ACS
APA
ABNT
Chicago
Harvard
MLA
Turabian
Vancouver
Descargar cita
Visitas a la página del resumen del artículo
Descargas
Licencia
Derechos de autor 2011 DYNA

Esta obra está bajo una licencia internacional Creative Commons Atribución-NoComercial-SinDerivadas 4.0.
El autor o autores de un artículo aceptado para publicación en cualquiera de las revistas editadas por la facultad de Minas cederán la totalidad de los derechos patrimoniales a la Universidad Nacional de Colombia de manera gratuita, dentro de los cuáles se incluyen: el derecho a editar, publicar, reproducir y distribuir tanto en medios impresos como digitales, además de incluir en artículo en índices internacionales y/o bases de datos, de igual manera, se faculta a la editorial para utilizar las imágenes, tablas y/o cualquier material gráfico presentado en el artículo para el diseño de carátulas o posters de la misma revista.













