



Published
Neural fuzzy digital filtering: multivariate identifier filters involving multiple inputs and multiple outputs (MIMO)
Filtrado digital neuronal difuso: caso MIMO
DOI:
https://doi.org/10.15446/ing.investig.v31n1.20569Keywords:
digital filter, fuzzy control, neural network, MIMO, adaptive digital system. (en)filtro digital, control difuso, red neuronal, MIMO, adaptivo. (es)
Downloads
Multivariate identifier filters (multiple inputs and multiple outputs - MIMO) are adaptive digital systems having a loop in accordance with an objective function to adjust matrix parameter convergence to observable reference system dynamics. One way of complying with this condition is to use fuzzy logic inference mechanisms which interpret and select the best matrix parameter from a knowledge base. Such selection mechanisms with neural networks can provide a response from the best operational level for each change in state (Shannon, 1948). This paper considers the MIMO digital filter model using neuro fuzzy digital filtering to find an adaptive parameter matrix which is integrated into the Kalman filter by the transition matrix. The filter uses the neural network as back-propagation into the fuzzy mechanism to do this, interpreting its variables and its respective levels and selecting the best values for automatically adjusting transition matrix values. The Matlab simulation describes the neural fuzzy digital filter giving an approximation of exponential convergence seen in functional error.
Los filtros identificadores multivariables (MIMO) son sistemas digitales adaptivos que cuentan con retroalimentación para que, de acuerdo a una función objetivo, ajusten su matriz de parámetros con la que se aproximan a la dinámica observable del sistema de referencia. Una forma de que un identificador cumpla con esas condiciones, es la de la lógica difusa por medio de sus mecanismos de inferencia que interpretan y seleccionan en una base de conocimiento la mejor matriz de parámetros. Estos mecanismos de selección mediante las redes neuronales permiten encontrar la respuesta con el mejor nivel de operación para cada cambio de estado (Shannon, 1948). En este artículo se considera en el modelo MIMO del filtrado digital, el proceso neuronal difuso para la estimación matricial de parámetros adaptiva, que se integra en el filtro de Kalman a través de la matriz de transición. Para ello se utilizó la red neuronal del tipo retropropagación en el mecanismo difuso, interpretando sus variables y sus respectivos niveles, seleccionando los mejores valores para ajustar automáticamente los valores de la matriz de transición. La simulación en Matlab presenta al filtrado digital neuronal difuso dando el seguimiento, observándose un funcional de error decreciente exponencialmente.
Filtrado digital neuronal difuso: caso MIMO
Neural fuzzy digital filtering: multivariate identifier filters involving multiple inputs and multiple outputs (MIMO) Juan Carlos García Infante1, José de J. Medel Juárez2, Juan Carlos Sánchez García3
1 Ph.D., en Tecnología Avanzada y Ciencia Aplicada en el CICATA Legaria. Vinculado a SEPI, ESIME Culhuacán, México. jcnet21@yahoo.com
2 Ph.D., en ciencias en Control Automático en el CINVESTAV. Vinculado a CIC, México. jjmedelj@yahoo.com.mx
3 Ph.D., en Sistemas Digitales en la UAM Iztapalapa, México. Vinculado a SEPI, ESIME Culhuacán, México. jcsanchezgarcia@gmail.com
RESUMEN
Los filtros identificadores multivariables (MIMO) son sistemas digitales adaptivos que cuentan con retroalimentación para que, de acuerdo a una función objetivo, ajusten su matriz de parámetros con la que se aproximan a la dinámica observable del sistema de referencia. Una forma de que un identificador cumpla con esas condiciones, es la de la lógica difusa por medio de sus mecanismos de inferencia que interpretan y seleccionan en una base de conocimiento la mejor matriz de parámetros. Estos mecanismos de selección mediante las redes neuronales permiten encontrar la respuesta con el mejor nivel de operación para cada cambio de estado (Shannon, 1948). En este artículo se considera en el modelo MIMO del filtrado digital, el proceso neuronal difuso para la estimación matricial de parámetros adaptiva, que se integra en el filtro de Kalman a través de la matriz de transición. Para ello se utilizó la red neuronal del tipo retropropagación en el mecanismo difuso, interpretando sus variables y sus respectivos niveles, seleccionando los mejores valores para ajustar automáticamente los valores de la matriz de transición. La simulación en Matlab presenta al filtrado digital neuronal difuso dando el seguimiento, observándose un funcional de error decreciente exponencialmente.
Palabras clave: filtro digital, control difuso, red neuronal, MIMO, adaptivo.
ABSTRACT
Multivariate identifier filters (multiple inputs and multiple outputs - MIMO) are adaptive digital systems having a loop in accordance with an objective function to adjust matrix parameter convergence to observable reference system dynamics. One way of complying with this condition is to use fuzzy logic inference mechanisms which interpret and select the best matrix parameter from a knowledge base. Such selection mechanisms with neural networks can provide a response from the best operational level for each change in state (Shannon, 1948). This paper considers the MIMO digital filter model using neuro fuzzy digital filtering to find an adaptive parameter matrix which is integrated into the Kalman filter by the transition matrix. The filter uses the neural network as backpropagation into the fuzzy mechanism to do this, interpreting its variables and its respective levels and selecting the best values for automatically adjusting transition matrix values. The Matlab simulation describes the neural fuzzy digital filter giving an approximation of exponential convergence seen in functional error.
Keywords: digital filter, fuzzy control, neural network, MIMO, adaptive digital system.
Recibido: noviembre 25 de 2009. Aceptado: enero 24 de 2011
Introducción
Una red neuronal artificial es un modelo computacional que imita un proceso natural como un sistema biológico, que tiene elementos de procesamiento llamados neuronas, como en el cerebro humano, todas ellas interconectadas, conformando una estructura de red neuronal (Nikola, 1996; Medel et al., 2008). Una red neuronal difusa clasifica, busca y asocia información (Huang, et al., 2006), dando un valor de respuesta correspondiente que esté de acuerdo con la señal deseada del proceso de referencia, construyendo el volumen de control descrito como

donde  dentro de los
dentro de los
intervalos de membresía delimitados en la base de conocimiento (Schneider y Kandel, 1996).
Filtro neuronal difuso
El conjunto de respuestas dentro de la base de conocimiento representa todas las posibles respuestas correctas del filtro (Gustafsson, 2000; Margaliot y Langholz, 2000; Zadeh, 1965) de acuerdo a una ley objetivo previamente definida por el proceso de referencia natural; el mecanismo de filtrado seleccionará la mejor respuesta de la base de conocimiento en cada estado empleando reglas difusas (if-then).
El filtro neuronal difuso está basado en el algoritmo de retropropagación, ya que sus parámetros se actualizan dinámicamente (Ali, 2003; Amble, 1987; Haykin, 1996) y en diferentes niveles a cada iteración (Huang et al., 2006), en base al error descrito como E(k) (reduciéndolo por medio del criterio  , ésta es la estructura
MIMO) que es la diferencia entre la respuesta deseada Y(k) y la salida del filtro actual
, ésta es la estructura
MIMO) que es la diferencia entre la respuesta deseada Y(k) y la salida del filtro actual  (García et al., 2008; Marcek, 2008). La figura 1 muestra el proceso del filtrado (Passino, 1998):
(García et al., 2008; Marcek, 2008). La figura 1 muestra el proceso del filtrado (Passino, 1998):

El error (E(k)) está limitado en el intervalo [0, ε] y ε es descrito como un valor positivo de acuerdo con
 donde i es el índice, con k intervalos (Margaliot y Langholz, 2000; Morales, 2002). Descrito de la forma: sup
donde i es el índice, con k intervalos (Margaliot y Langholz, 2000; Morales, 2002). Descrito de la forma: sup  , t a l q u e
, t a l q u e  , donde ,
, donde ,  , sup
, sup 
El filtro neuronal difuso está basado en los siguientes elementos, considerando los conceptos descritos en (Abraham, 1991; Ali, 2003; Gustafsson, 2000; Mamdani, 1974; Morales, 2002):
Entrada de inferencia difusa: en esta etapa la señal deseada Y(k) desde el sistema de referencia a la entrada del filtro tiene una descripción en un sentido métrico (Ash, 1970).
Base de reglas: son intervalos de rango dinámico que hacen una interpretación o inferencia en la entrada del filtro empleando el conector lógico binario conocido como Si (IF).
Mecanismo de inferencia: es la acción experta con respecto a la base de reglas, conocida como consecuencia para seleccionar la función de membresía correspondiente descrita como Â(K) por medio del conector lógico binario Entonces (THEN) (Yamakawa, 1989).
Función de activación: ésta es la etapa de filtrado, la cual es la respuesta digital del filtro transformada en una respuesta natural. Es el valor que tiene la mejor aproximación a la señal deseada, sustentada en una base de conocimiento definida previamente.
Realimentación natural: finalmente, el proceso de filtrado toma el valor lingüístico correcto y actualiza los parámetros del filtro a una condición natural con respecto al sistema de referencia, considerando la diferencia de error existente entre Y(K) y de forma dinámica, utilizando el criterio descrito como funcional de error (es la matriz del funcional del error J(K) que describe la relación de convergencia entre el valor observado real y su estimación. En forma recursiva es:  .)
.)
El funcional de error es una matriz cuadrática dimensional donde,  es la matriz de referencia y el sistema es convergente a m si
es la matriz de referencia y el sistema es convergente a m si  . El funcional es expresado con respecto al segundo momento de probabilidad, teniendo un valor ínfimo descrito en (1 ).
. El funcional es expresado con respecto al segundo momento de probabilidad, teniendo un valor ínfimo descrito en (1 ).
 | (1) |
En resumen el filtrado neuronal difuso tiene previamente toda la información requerida dentro de su base de conocimiento para seleccionar la respuesta correspondiente al valor de la señal deseada en la entrada del filtro. Primero, el proceso de filtrado emplea las reglas difusas establecidas para hacer una inferencia o interpretación del vector de la señal deseada expresada como Y(K) (Takagi y Sugeno, 1986). El mecanismo del filtro selecciona dentro de su estructura de datos la variable activada y su nivel correspondiente (la variable, por ejemplo, puede ser A: temperatura, B: velocidad y C: presión, y su respectivo nivel: bajo, medio y alto); entonces el mecanismo de reglas selecciona el parámetro correspondiente Â(K) para ajustar el filtro y dar el vector de respuesta correcto a la entrada del filtro (Rajem y Gopal, 2006).
Propiedades de la matriz de parámetros
Para hacer la descripción de un filtro neuronal difuso en su forma multivariable con variaciones de tiempo, el parámetro  debe cumplir condiciones de acuerdo a la matriz de transición:
debe cumplir condiciones de acuerdo a la matriz de transición:
Tiene restricciones en su operación de acuerdo a las propiedades
dinámicas de la matriz de transición: 1) , 2)
, 2) ,3)
,3) . Donde ,
. Donde ,  y I son las matrices descritas como infinito, nula y la identidad de forma respectiva. El estimador por medio de la matriz de transición es descrito en (2).
y I son las matrices descritas como infinito, nula y la identidad de forma respectiva. El estimador por medio de la matriz de transición es descrito en (2).
 | (2) |
Cuyas velocidades de cambio están acotadas dentro de la función de transición (3 ).
 | (3) |
La matriz de transición se encuentra acotada en  .
.
De acuerdo al valor del  , la matriz de parámetros estimada cumple con la desigualdad (4).
, la matriz de parámetros estimada cumple con la desigualdad (4).
| (4) |
Y el identificador de Kalman usando a (4), se presenta en (5).
 | (5) |
Donde  es la matriz de ganancias de Kalman descrita por la varianza del error de identificación definido por la diferencia de la señal deseada respecto de la señal de salida del filtro, descrito de manera recursiva,y
es la matriz de ganancias de Kalman descrita por la varianza del error de identificación definido por la diferencia de la señal deseada respecto de la señal de salida del filtro, descrito de manera recursiva,y  es el ruido que excita al proceso de referencia.
es el ruido que excita al proceso de referencia.
Resultados
La simulación del filtro neural difuso MIMO se realiza considerando al filtro de Kalman (Haykin, 1996) con una matriz de transición descrita por la base del conocimiento de acuerdo al criterio del funcional del error (Ash, 1970). Los tiempos de evolución que delimitan un sistema de tipo soft (estadístico) implantado en una computadora con procesador AMD Sempron 3100+ con intervalos k, teniendo un promedio en el tiempo de evolución de 0,004 seg ± 0,0002 seg. El sistema ARMA básicamente representa un sistema de referencia en un espacio de estados discreto expresado por la diferencia de primer orden en (6).
 | (6) |
Y su salida es descrita en (7).
 | (7) |
Donde 
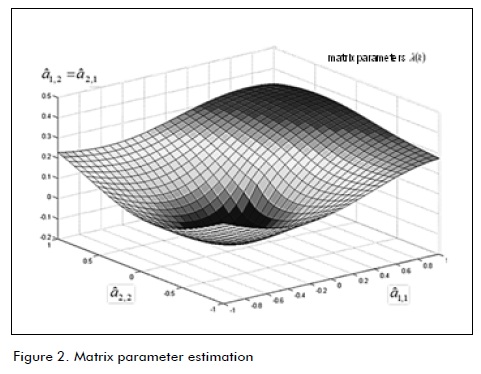
X(k) es el vector de estados internos, A(k) es la matriz de parámetros, W(k) es el conjunto de ruidos que perturban al sistema, y(k) es el conjunto de vectores de señales deseadas del sistema de referencia a la entrada del filtro y V(k) es el vector de ruidos de salida. Los diferentes niveles de operación están descritos para operar con respecto al funcional del error1. El proceso de filtrado establece para cada variable una descripción lingüística expresada por los niveles: bajo, medio y alto. La figura 2 muestra la estimación de la matriz de parámetros descrita en este caso por una matriz 

De acuerdo a la estimación de parámetros descrita con la variable Â(K), la figura 3 muestra la proyección de los niveles de respuesta a la salida del filtro descrita con la variable  respecto de la señal deseada del sistema de referencia Y(k)1. En cuanto a los valores de Â(K), la figura 4 muestra la proyección de los niveles a la salida del filtro con respecto a la variable
respecto de la señal deseada del sistema de referencia Y(k)1. En cuanto a los valores de Â(K), la figura 4 muestra la proyección de los niveles a la salida del filtro con respecto a la variable  y a la señal deseada del sistema de referencia descrita como Y(k)2 .
y a la señal deseada del sistema de referencia descrita como Y(k)2 .

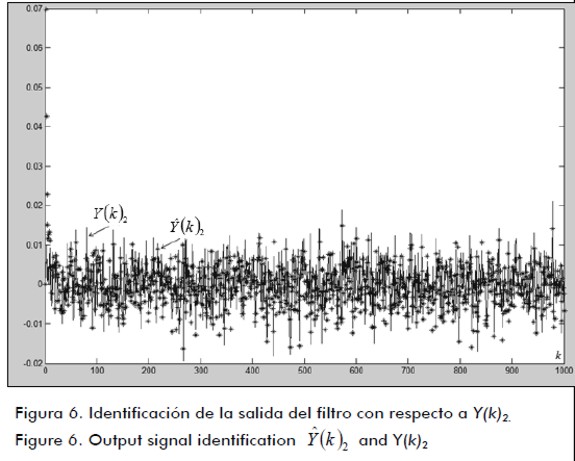
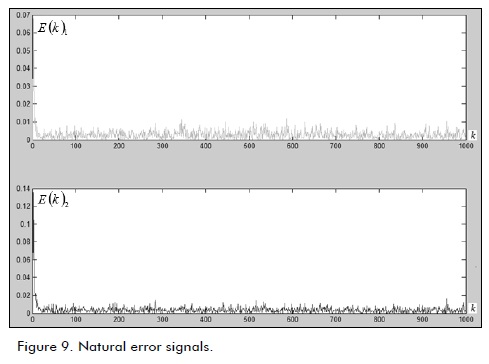
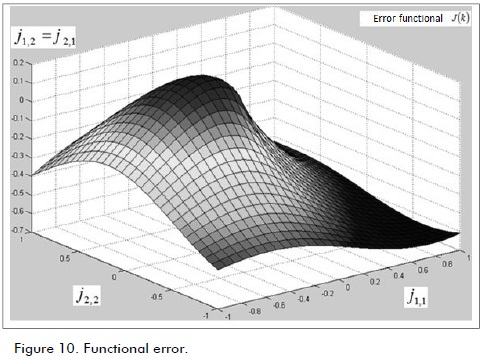
La figura 5 muestra la estimación de La figura 7 exhibe el histograma de La figura 9 revela la señal de error natural descrita como E(K) de acuerdo a cada señal deseada y la diferencia con la señal de salida respectiva; y la figura10, la minimización de la señal de error natural descrita como J(K) que es la matriz del funcional del error de acuerdo a la figura 9. Según el análisis de los resultados, el tiempo de evolución de la respuesta del filtro es menor que el tiempo de cambio de estado del proceso de referencia propuesto con el valor 0,09 seg, delimitado por el procesador, de acuerdo a la condición descrita en (7). El tiempo de convergencia es de 0,0862 seg, el cual es menor que la condición de tiempo de evolución de la referencia descrito como LDmax (García et al., 2008), de acuerdo a las propiedades descritas en las definiciones de este trabajo. Conclusiones En el artículo se describe al filtrado digital neural difuso multivariable (MIMO Multiple Inputs and Multiple Outputs), aplicado a sistemas dinámicos. Se realiza un análisis de su operación como un filtro adaptivo en función del error de identificación por medio de la matriz de transición dentro del filtro de Kalman. Para la selección adaptiva de la matriz de parámetros se consideró como herramienta el proceso formado por la red neuronal de retropropagación con los mecanismos difusos de selección de la matriz de parámetros, describiendo con la simulación el mecanismo de inferencia adaptiva, el cual clasifica y deduce las respuestas del filtro de acuerdo a la señal deseada y basada en el criterio de error, para seleccionar los valores de los pesos de la matriz de transición dentro del filtro identificador. Se establece cómo construir y caracterizar las funciones de membresía de la base de conocimiento descrita en forma probabilística con el conjunto de reglas de decisión, integrando la arquitectura de la red neuronal de retropropagación para la selección automática de los parámetros de la matriz de transición. Los resultados se mostraron de forma ilustrativa, describiendo a la salida del filtro como Referencias Abraham, K., Fuzzy Expert Systems., Florida, CRC Press, 1991. Ali, H.S., Fundamentals of Adaptive Filters., New Jersey, John Wiley & Sons, 2003. Amble, T., Logic Programming and Knowledge Engineering.,USA, Addison Wesley, 1987. Ash, R., Real Analysis and Probability., USA, Ed. Academic Press, 1970. García, J.C., Medel, J. J., Guevara, P., RTFDF Description for ARMA Systems., WSEAS Journal: Transactions on Systems and Control, Vol. 2, Issue 10, 2007, pp. 491-496. García, J.C., Medel, J.J., Guevara, P., Filtrado Digital Difuso en Tiempo Real., Revista Computación y Sistemas, Vol. 11, No. 4, 2008, pp. 390-401. García, J.C., Medel, J.J., Guevara, P., Real-time neuro-fuzzy digital filtering: Approach., Computer and Simulation in Modern Science, WSEAS press selected papers, Vol. 1, 2008, pp. 122-125. Haykin, S., Adaptive Filtering., USA, Prentice Hall, 1996. Huang, G., Zhu, K., Siew, C., Real-Time Learning Capability of Neural Networks., IEEE Transactions on Neural Networks, Vol. 17, 2006, pp. 863-878. Gustafsson, F., Adaptive Filtering and Change Detection., Inglaterra,John Wiley and Sons, 2000. Mamdani, E., Applications of Fuzzy Algorithms for Control of Simple Dynamic Plant., Proc. IEEE, Vol. 121, 1974, pp. 1585-1588. L. Manuel, Teoría de la Medida e Integral de Lebesgue, Universidad Nacional del Rosario, 2003. Margaliot, M., Langholz, G., New Approaches to Fuzzy Modeling and Control Design and Analysis., Singapore, World Scientific, 2000. Medel, J.J., Guevara, P., Caracterización de Filtros Digitales en Tiempo-real para Computadoras Digitales., Computación y Sistemas, Vol. VII, No. 3, 2004. Medel, J.J., García, J.C., Guevara, P., Real-time Fuzzy Digital Filters (RTFDF) Properties for SISO Systems., Automatic Control and Computer Sciences, AVT, Vol. 42, No. 1, 2008, pp. 26-34. Medel, J.J., García, J.C., Sánchez, J.C., Real-time Neuro-Fuzzy Digital Filtering: Basic Concepts., WSEAS Transactions on Systems and Control, 2008, Vol. 3, Issue 8, pp. 654-663. Marcek, D., Stock Price Forecasting: Statistical, Classical and Fuzzy Neural Networks., Modeling Decisions for Artificial Intelligence, Springer Verlag, 2004, pp. 41-48. Morales, G., Introducción a la Lógica Difusa., México, Cinvestav -IPN, 2002. Nikola, K., Foundations of Neural Networks, Fuzzy Systems, and Knowledge Engineering., Hong Kong, The MIT Press, 1996. Passino, K.M., Fuzzy Control, USA, Addison Wesley, 1998. Rajen, B., Gopal, M., Neuro-Fuzzy Decision Trees., International Journal of Neural Filters, Vol. 16, 2006, pp. 63-68. Shannon, M., A Mathematical Theory of Communication., Bell Systems Technical Journal, Vol.27, 1948, pp. 379-423 and pp. 623-656. Schneider, M., Kandel, A., Fuzzy expert systems tools., Inglaterra, John Wiley & Sons, 1996. Takagi, T., Sugeno, M., Fuzzy Identification of Systems and its Applications to Modelling and control., IEEE Transactions and Systems, man, and cybernetics, Vol. 15, 1986, pp. 116-132. Yamakawa, F., Fuzzy Neurons and Fuzzy Neural Networks., 1989. Zadeh, L., Fuzzy Sets., Information and control, Vol. 8, 1965, pp. 338-353. , con respecto a la señal deseada Y(k)1 a la entrada del filtro, y la figura 6 la estimación de , con respecto a la señal deseada Y(k)2 a la entrada del filtro.
, con respecto a la señal deseada Y(k)1 a la entrada del filtro, y la figura 6 la estimación de , con respecto a la señal deseada Y(k)2 a la entrada del filtro.
 , y de la señal deseada Y(k)1 y la figura 8 el histograma de , y de la señal deseada Y(k)2 .
, y de la señal deseada Y(k)1 y la figura 8 el histograma de , y de la señal deseada Y(k)2 .


 con respecto a la señal deseada expresada como Y(K)1 como se ve en la figura 5, así como y en la figura 6 , minimizando el error natural (figura 9) y el funcional del error J(K) (figura 10). Como trabajo futuro se necesita ver el proceso de estimación con un sistema evolutivo, y comparar sus con los actuales.
con respecto a la señal deseada expresada como Y(K)1 como se ve en la figura 5, así como y en la figura 6 , minimizando el error natural (figura 9) y el funcional del error J(K) (figura 10). Como trabajo futuro se necesita ver el proceso de estimación con un sistema evolutivo, y comparar sus con los actuales.
Neural fuzzy digital filtering: multivariate identifier filters involving multiple inputs and multiple outputs (MIMO)
Juan Carlos García Infante1, José de J. Medel Juárez2, Juan Carlos Sánchez García3
1 Ph.D., Advanced Technology and Applied Science at the CICATA Legaria. Associated to SEPI, ESIME Culhuacán, Mexico.jcnet21@yahoo.com
2 Ph.D., Science in Automatic Control at the CINVESTAV. Associated to CIC, Mexico. jjmedelj@yahoo.com.mx
3 Ph.D., Digital Systems at the UAM Iztapalapa, Mexico. Associated to SEPI, ESIME Culhuacán, México. jcsanchezgarcia@gmail.com
ABSTRACT
Multivariate identifier filters (multiple inputs and multiple outputs - MIMO) are adaptive digital systems having a loop in accordance with an objective function to adjust matrix parameter convergence to observable reference system dynamics. One way of complying with this condition is to use fuzzy logic inference mechanisms which interpret and select the best matrix parameter from a knowledge base. Such selection mechanisms with neural networks can provide a response from the best operational level for each change in state (Shannon, 1948). This paper considers the MIMO digital filter model using neuro fuzzy digital filtering to find an adaptive parameter matrix which is integrated into the Kalman filter by the transition matrix. The filter uses the neural network as backpropagation into the fuzzy mechanism to do this, interpreting its variables and its respective levels and selecting the best values for automatically adjusting transition matrix values. The Matlab simulation describes the neural fuzzy digital filter giving an approximation of exponential convergence seen in functional error.
Keywords: digital filter, fuzzy control, neural network, MIMO, adaptive digital system.
Recibido: November 25th 2009
Aceptado: January 24th 2011
Introduction
An artificial neural network is a computational model which imitates a natural process such as a biological system. It has processing elements called neurons as in the human ain which are all interconnected, thereby constructing a neural network structure (Nikola, 1996; Medel et al., 2008). A fuzzy neural network classifies, searches for and associates information (Huang et al., 2006), giving a specific value in accordance with a desired reference signal. It constructs control volume described as

where  within membership intervals is delimited into a knowledge base (Schneider and Kandel, 1996).
within membership intervals is delimited into a knowledge base (Schneider and Kandel, 1996).
Fuzzy neural filter
Responses set into the knowledge base represent all possible correct filter responses (Gustafsson, 2000; Margaliot and Langholz, 2000; Zadeh, 1965) in accordance with an objective law, previously defined by actual natural references. The filtering mechanism selects the best response from the knowledge base when the state changes, using fuzzy (if-then) rules. The neural fuzzy filter is based on a back-propagation algorithm because its parameters are dynamically updated (Ali, 2003; Amble, 1987; Haykin, 1996), having different levels for each iteration (Huang, Zhu and Siew, 2006) using error described as E(k) (minimising it using  criterion in MIMO structure, this being the distance between the desired signal Y(k) and actual filter output
criterion in MIMO structure, this being the distance between the desired signal Y(k) and actual filter output  (García et al., 2008; Marcek, 2008). Figure 1 shows the filtering (Passino, 1998).
(García et al., 2008; Marcek, 2008). Figure 1 shows the filtering (Passino, 1998).

Error ((E(k))) has a limit interval [0, ε] and e is described as being a positive value in accordance with  (i, is the index with k intervals) (Margaliot and Langholz, 2000)
( M o r a l e s , 2 0 0 2 ) . D e s c r i b e d a s : s u p
(i, is the index with k intervals) (Margaliot and Langholz, 2000)
( M o r a l e s , 2 0 0 2 ) . D e s c r i b e d a s : s u p  , where
, where  , sup
, sup  .
.
A neural fuzzy filter considers the following elements and concepts described in (Aaham, 1991; Ali, 2003; Gustafsson, 2000; Mamdani, 1974; Morales, 2002):
Fuzzy inference input. Filter input has metric sense description during this desired signal stage from reference system Y(k) (Ash, 1970);
Rule base: This is an inference set of filter input interprets using binary logic IF connector;
Inference mechanism: This is the expert consequence regarding the rule base for selecting membership function described as Â(K) using the logic THEN connector (Yamakawa, 1989);
Activation function: This is the response filter stage transformed into a natural response. It is the best desired signal approximation value, previously described in the knowledge base; and
Natural updating: The filter process acquires the correct linguistic value and updates filter parameter values to a natural condition regarding the reference system, considering error difference between Y(K) and dynamically using functional error criterion J(K) (being the functional error matrix describing the real observed convergence value relationship and its estimation. I n r e c u r s i v e f o r m , t h i s i s :  ).
).
Functional error is a dimensional quadratic matrix where  , having convergence in m if
, having convergence in m if  . The function is expressed in accordance with the second probability moment, its infimum value being described in (1).
. The function is expressed in accordance with the second probability moment, its infimum value being described in (1).
 | (1) |
The neural fuzzy filter needs the knowledge base to select the corresponding response in accordance with the desired signal. Filtering first uses established fuzzy rules to infer or interpret the desired signal vector expressed as Y(K)(Takagi and Sugeno, 1986). The filter mechanism selects the correct variable in its data form and selects the level (the variable could be A temperature, B velocity or C pressure, respective levels being low, medium or high). The rules mechanism then selects the corresponding parameter Â(K) to adjust the filter, thereby giving the correct vector response at filter output (Rajem and Gopal, 2006).
Parameter matrix properties
Multivariate neural fuzzy filter parameters  must fulfil conditions in accordance with the transition matrix:
It has dynamic transition matrix restriction operation: 1)
must fulfil conditions in accordance with the transition matrix:
It has dynamic transition matrix restriction operation: 1) , 2)
, 2) ,3)
,3) . Where ,
. Where ,  and I are a matrix described as infinity, null and identity, respectively. The estimator is described using the
transition matrix in (2):
and I are a matrix described as infinity, null and identity, respectively. The estimator is described using the
transition matrix in (2):
 | (2) |
Change speed is limited within transition function (3 ):
 | (3) |
The transition matrix is bounded in  .
.
In accordance with the value for  , the estimated parameter matrix complies with the difference in (4):
, the estimated parameter matrix complies with the difference in (4):
| (4) |
The Kalman filter (5) considered (4):
 | (5) |
where Kalman matrix gain ( ) is a functional identification error, defined by the second probability moment between the desired signal and output recursive filter signal and
) is a functional identification error, defined by the second probability moment between the desired signal and output recursive filter signal and  , represents noise.
, represents noise.
Results
The MIMO neural fuzzy filter considered Kalman filter structure (Hayking, 1996), the transition matrix being based on knowledge according to functional error criteria (Ash, 1970). A statistical software system considered evolution times bounded by PC with AMD Sempron 3100+ processor performance at k intervals, average evolution time being 0.004 sec ± 0.0002 sec. This paper used the first order differential and discrete ARMA model (6) to represent a reference system.
 | (6) |
Output (7):
 | (7) |
Where 
X(k) was the internal state vector, A(k) represented matrix parameters, W(k) was vector noise within the system, Y(k) was the reference vector desired system signal at filter input and V(k) was output vector noise.
Operational levels were described for operation regarding functional error. Filtering gives each variable a linguistic description expressed as low, medium and high levels. Figure2 shows matrix parameter estimation given by 
Considering matrix parameter estimation Â(K) in (5), Figure 3
shows projected response levels at filter output  with desired signal Y(k)1. Figure 4 presents projection variables
with desired signal Y(k)1. Figure 4 presents projection variables  and Y(k)2.
and Y(k)2.


Figures 5 and 6 show identification and desired signal Y (k)1 and,, with Y(k)2 , respectively.

Figures 7 and 8 show the histogram for and desired signal Y(k)1 and the histogram for , and Y(k)2, respectively.
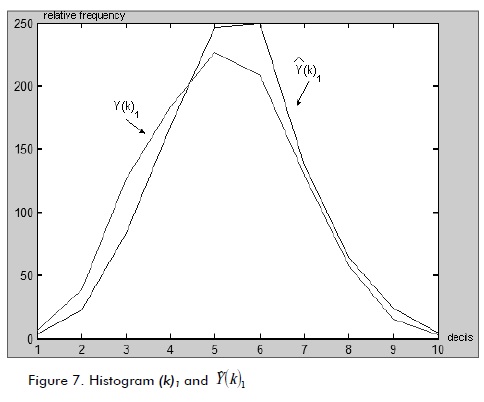

Figure 9 shows the natural error signal described by E(K). Figure 10 shows the minimisation of the natural error signal described as J(K), i.e. the functional error matrix in accordance with Figure 9.
Filter response evolution time was less than the proposed 0.09 sec reference time state change delimited by the processor, considered in (7). Convergence time was 0.0862 sec. which was less than the LDmax evolution time described in (García et al., 2008).
Conclusions
This paper has described a multivariable neural fuzzy digital filter (having multiple inputs and multiple outputs - MIMO) applied to dynamic systems. Its operational adaptive conditions were analysed based on functional error identification and transition matrix within Kalman filter structure in which a back-propagation model integrated into fuzzy mechanisms enabled matrix parameter selection. In simulation, the adaptive inference mechanism classified and deduced filter response in accordance with the desired signal, selecting transition matrix weighting for identification requirements.
Characterising and constructing membership functions from the probabilistic knowledge base as a set of decision rules led to integrating neural network architecture by automatically selecting parameters. The results illustratively described filter output , (see Figures 5 and 6). Natural error (see Figure 9)
and functional error J(K)(see Figure 10) showed the convergence levels. Future work will consider evolutionary properties
for estimation instead of fuzzy logic.
References
Aaham, K., Fuzzy Expert Systems., Florida, CRC Press, 1991.
Ali, H.S., Fundamentals of Adaptive Filters., New Jersey, John Wiley & Sons, 2003.
Amble, T., Logic Programming and Knowledge Engineering.,USA, Addison Wesley, 1987.
Ash, R., Real Analysis and Probability., USA, Ed. Academic Press, 1970.
García, J.C., Medel, J. J., Guevara, P., RTFDF Description for ARMA Systems., WSEAS Journal: Transactions on Systems and Control, Vol. 2, Issue 10, 2007, pp. 491-496.
García, J.C., Medel, J.J., Guevara, P., Filtrado Digital Difuso en Tiempo Real., Revista Computación y Sistemas, Vol. 11, No. 4, 2008, pp. 390-401.
García, J.C., Medel, J.J., Guevara, P., Real-time neuro-fuzzy digital filtering: Approach., Computer and Simulation in Modern Science, WSEAS press selected papers, Vol. 1, 2008, pp. 122-125.
Haykin, S., Adaptive Filtering., USA, Prentice Hall, 1996.
Huang, G., Zhu, K., Siew, C., Real-Time Learning Capability of Neural Networks., IEEE Transactions on Neural Networks, Vol. 17, 2006, pp. 863-878.
Gustafsson, F., Adaptive Filtering and Change Detection., Inglaterra,John Wiley and Sons, 2000.
Mamdani, E., Applications of Fuzzy Algorithms for Control of Simple Dynamic Plant., Proc. IEEE, Vol. 121, 1974, pp. 1585-1588.
L. Manuel, Teoría de la Medida e Integral de Lebesgue, Universidad Nacional del Rosario, 2003.
Margaliot, M., Langholz, G., New Approaches to Fuzzy Modeling and Control Design and Analysis., Singapore, World Scientific, 2000.
Medel, J.J., Guevara, P., Caracterización de Filtros Digitales en Tiempo-real para Computadoras Digitales., Computación y Sistemas, Vol. VII, No. 3, 2004.
Medel, J.J., García, J.C., Guevara, P., Real-time Fuzzy Digital Filters (RTFDF) Properties for SISO Systems., Automatic Control and Computer Sciences, AVT, Vol. 42, No. 1, 2008, pp. 26-34.
Medel, J.J., García, J.C., Sánchez, J.C., Real-time Neuro-Fuzzy Digital Filtering: Basic Concepts., WSEAS Transactions on Systems and Control, 2008, Vol. 3, Issue 8, pp. 654-663.
Marcek, D., Stock Price Forecasting: Statistical, Classical and Fuzzy Neural Networks., Modeling Decisions for Artificial Intelligence, Springer Verlag, 2004, pp. 41-48.
Morales, G., Introducción a la Lógica Difusa., México, Cinvestav -IPN, 2002.
Nikola, K., Foundations of Neural Networks, Fuzzy Systems, and Knowledge Engineering., Hong Kong, The MIT Press, 1996.
Passino, K.M., Fuzzy Control, USA, Addison Wesley, 1998.
Rajen, B., Gopal, M., Neuro-Fuzzy Decision Trees., International Journal of Neural Filters, Vol. 16, 2006, pp. 63-68.
Shannon, M., A Mathematical Theory of Communication., Bell Systems Technical Journal, Vol.27, 1948, pp. 379-423 and pp. 623-656.
Schneider, M., Kandel, A., Fuzzy expert systems tools., Inglaterra, John Wiley & Sons, 1996.
Takagi, T., Sugeno, M., Fuzzy Identification of Systems and its Applications to Modelling and control., IEEE Transactions and Systems, man, and cybernetics, Vol. 15, 1986, pp. 116-132.
Yamakawa, F., Fuzzy Neurons and Fuzzy Neural Networks., 1989.
Zadeh, L., Fuzzy Sets., Information and control, Vol. 8, 1965, pp. 338-353.
References
Abraham, K., Fuzzy Expert Systems., Florida, CRC Press, 1991.
Ali, H.S., Fundamentals of Adaptive Filters., New Jersey, John Wiley & Sons, 2003.
Amble, T., Logic Programming and Knowledge Engineering., USA, Addison Wesley, 1987.
Ash, R., Real Analysis and Probability., USA, Ed. Academic Press, 1970.
García, J.C., Medel, J. J., Guevara, P., RTFDF Description for ARMA Systems., WSEAS Journal: Transactions on Systems and Control, Vol. 2, Issue 10, 2007, pp. 491-496.
García, J.C., Medel, J.J., Guevara, P., Filtrado Digital Difuso en Tiempo Real., Revista Computación y Sistemas, Vol. 11, No. 4, 2008, pp. 390-401.
García, J.C., Medel, J.J., Guevara, P., Real-time neuro-fuzzy digital filtering: Approach., Computer and Simulation in Modern Science, WSEAS press selected papers, Vol. 1, 2008, pp. 122-125.
Haykin, S., Adaptive Filtering., USA, Prentice Hall, 1996.
Huang, G., Zhu, K., Siew, C., Real-Time Learning Capability of Neural Networks., IEEE Transactions on Neural Networks, Vol. 17, 2006, pp. 863-878. DOI: https://doi.org/10.1109/TNN.2006.875974
Gustafsson, F., Adaptive Filtering and Change Detection., Inglaterra, John Wiley and Sons, 2000. DOI: https://doi.org/10.1002/0470841613
Mamdani, E., Applications of Fuzzy Algorithms for Control of Simple Dynamic Plant., Proc. IEEE, Vol. 121, 1974, pp. 1585-1588. DOI: https://doi.org/10.1049/piee.1974.0328
L. Manuel, Teoría de la Medida e Integral de Lebesgue, Universidad Nacional del Rosario, 2003.
Margaliot, M., Langholz, G., New Approaches to Fuzzy Modeling and Control Design and Analysis., Singapore, World Scientific, 2000. DOI: https://doi.org/10.1142/4446
Medel, J.J., Guevara, P., Caracterización de Filtros Digitales en Tiempo-real para Computadoras Digitales., Computación y Sistemas, Vol. VII, No. 3, 2004.
Medel, J.J., García, J.C., Guevara, P., Real-time Fuzzy Digital Filters (RTFDF) Properties for SISO Systems., Automatic Control and Computer Sciences, AVT, Vol. 42, No. 1, 2008, pp. 26-34.
Medel, J.J., García, J.C., Sánchez, J.C., Real-time Neuro-Fuzzy Digital Filtering: Basic Concepts., WSEAS Transactions on Systems and Control, 2008, Vol. 3, Issue 8, pp. 654-663.
Marcek, D., Stock Price Forecasting: Statistical, Classical and Fuzzy Neural Networks., Modeling Decisions for Artificial Intelligence, Springer Verlag, 2004, pp. 41-48. DOI: https://doi.org/10.1007/978-3-540-27774-3_5
Morales, G., Introducción a la Lógica Difusa., México, Cinvestav -IPN, 2002.
Nikola, K., Foundations of Neural Networks, Fuzzy Systems, and Knowledge Engineering., Hong Kong, The MIT Press, 1996.
Passino, K.M., Fuzzy Control, USA, Addison Wesley, 1998.
Rajen, B., Gopal, M., Neuro-Fuzzy Decision Trees., International Journal of Neural Filters, Vol. 16, 2006, pp. 63-68. DOI: https://doi.org/10.1142/S0129065706000470
Shannon, M., A Mathematical Theory of Communication., Bell Systems Technical Journal, Vol.27, 1948, pp. 379-423 and pp. 623-656. DOI: https://doi.org/10.1002/j.1538-7305.1948.tb00917.x
Schneider, M., Kandel, A., Fuzzy expert systems tools., Inglaterra, John Wiley & Sons, 1996.
Takagi, T., Sugeno, M., Fuzzy Identification of Systems and its Applications to Modelling and control., IEEE Transactions and Systems, man, and cybernetics, Vol. 15, 1986, pp. 116-132. DOI: https://doi.org/10.1109/TSMC.1985.6313399
Yamakawa, F., Fuzzy Neurons and Fuzzy Neural Networks., 1989.
Zadeh, L., Fuzzy Sets., Information and control, Vol. 8, 1965, pp. 338-353. DOI: https://doi.org/10.1016/S0019-9958(65)90241-X
How to Cite
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Download Citation
CrossRef Cited-by
1. Jorge Salvador Valdez Martínez, Gustavo Delgado Reyes, Pedro Guevara López, Juan Carlos García Infante. (2014). Reconstruction of the execution times dynamics of real-time tasks by fuzzy digital filtering. Revista Facultad de Ingeniería Universidad de Antioquia, (70), p.155. https://doi.org/10.17533/udea.redin.14002.
Dimensions
PlumX
Article abstract page views
Downloads




License
Copyright (c) 2011 Juan Carlos García Infante, José de J. Medel Juárez, Juan Carlos Sánchez García

This work is licensed under a Creative Commons Attribution 4.0 International License.
The authors or holders of the copyright for each article hereby confer exclusive, limited and free authorization on the Universidad Nacional de Colombia's journal Ingeniería e Investigación concerning the aforementioned article which, once it has been evaluated and approved, will be submitted for publication, in line with the following items:
1. The version which has been corrected according to the evaluators' suggestions will be remitted and it will be made clear whether the aforementioned article is an unedited document regarding which the rights to be authorized are held and total responsibility will be assumed by the authors for the content of the work being submitted to Ingeniería e Investigación, the Universidad Nacional de Colombia and third-parties;
2. The authorization conferred on the journal will come into force from the date on which it is included in the respective volume and issue of Ingeniería e Investigación in the Open Journal Systems and on the journal's main page (https://revistas.unal.edu.co/index.php/ingeinv), as well as in different databases and indices in which the publication is indexed;
3. The authors authorize the Universidad Nacional de Colombia's journal Ingeniería e Investigación to publish the document in whatever required format (printed, digital, electronic or whatsoever known or yet to be discovered form) and authorize Ingeniería e Investigación to include the work in any indices and/or search engines deemed necessary for promoting its diffusion;
4. The authors accept that such authorization is given free of charge and they, therefore, waive any right to receive remuneration from the publication, distribution, public communication and any use whatsoever referred to in the terms of this authorization.




















