


Publicado
Classification of pothole distress severity in asphalt pavements using YOLOv8
Clasificación de la severidad del deterioro tipo bache en pavimentos asfálticos utilizando YOLOv8
DOI:
https://doi.org/10.15446/dyna.v92n238.120252Palabras clave:
deep learning, machine learning, computer vision, object detection (en)aprendizaje profundo, aprendizaje automático, visión por computadora, detección de objetos (es)
Descargas
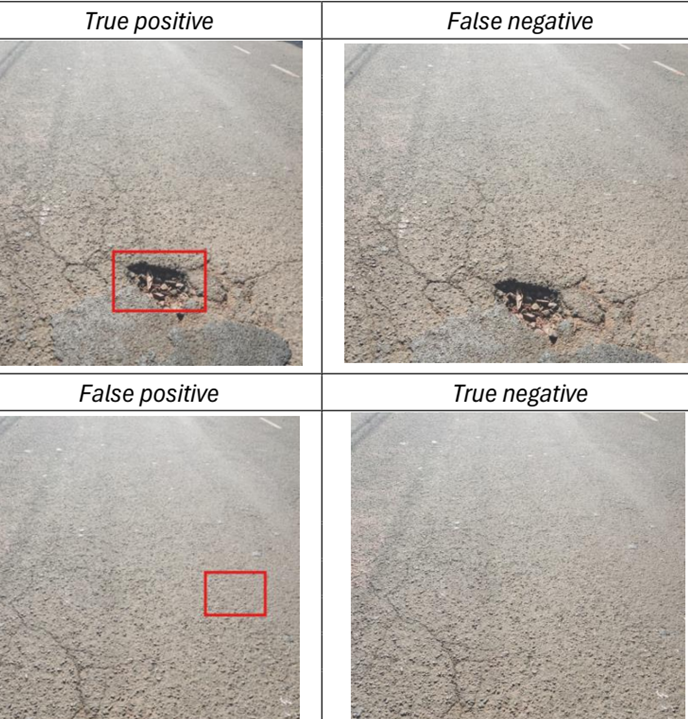
Potholes are a type of distress that occurs in pavement surfaces. According to the method adopted for distress surveys, potholes are classified into three levels of severity: low, medium, and high. The severity assessment is traditionally performed through slow and labor-intensive manual procedures. To automate this process, this study employed the YOLOv8s and YOLOv8m models to detect pothole distress and classify its severity. During the training phase, YOLOv8m achieved the best evaluation metrics, while YOLOv8s outperformed in the testing phase, particularly in recognizing high-severity potholes. However, both models failed to effectively detect low and medium severity levels, indicating the need for improvements before field application. One possible explanation for this limitation is the lack of depth information in the input images, a factor that will be addressed in future research.
Los baches son un tipo de deterioro que ocurre en las superficies de los pavimentos. De acuerdo con el método adoptado para el levantamiento de deterioros, los baches se clasifican en tres niveles de severidad: baja, media y alta. La determinación del nivel de severidad se realiza mediante procedimientos manuales que son lentos y extenuantes. Con el objetivo de automatizar este proceso, este estudio utilizó los modelos YOLOv8s y YOLOv8m para detectar el deterioro tipo bache y clasificar su severidad. En la etapa de entrenamiento, el modelo YOLOv8m obtuvo las mejores métricas, mientras que en la etapa de prueba el YOLOv8s mostró el mejor desempeño, destacándose en el reconocimiento de baches con severidad alta. No obstante, ambos modelos fueron incapaces de reconocer con precisión los niveles de severidad baja y media, lo que indica la necesidad de mejoras para su aplicación en campo. Una posible explicación de esta limitación es la ausencia de información de profundidad en las imágenes utilizadas, cuestión que será abordada en estudios futuros.
Referencias
[1] Zanchetta, F., Sistema de Gerência de Pavimentos Urbanos: avaliação de campo, modelo de desempenho e análise econômica, PhD dissertation, Departamento de Transportes, Universidade de São Paulo, São Carlos, 2017.
[2] Singh, P., Wijethunga, R., Sadhu, A., and Samarabandu, J., Expert evaluation system for pothole defect detection. Expert Systems with Applications, 277, art. 127280, 2025. DOI: https://doi.org/10.1016/j.eswa.2025.127280
[3] Domingues, F.A.A., MID: manual de identificação de defeitos de revesttimentos asfálticos de pavimentos. São Paulo: Camargo Campos, 1993.
[4] Bernucci, L.B., Motta, L.M.G., Ceratti, J.A.P., and Soares, J.B., Pavimentação asfáltica: formação básica para engenheiros, 2a ed. Rio de Janeiro: petrobras: ABEDA, 2022.
[5] ASTM, D6433., Standard practice for roads and parking lots pavement condition index surveys, ASTM International, 2024.
[6] Miller, J.S., and Bellinger, W.Y., Distress identification manual for the long-term pavement performance program, 2014.
[7] Souza, V.M.A., Giusti, R., and Batista, A.J.L., Asfault: a low-cost system to evaluate pavement conditions in real-time using smartphones and machine learning. Pervasive and Mobile Computing, 51, pp. 121–137, 2018. DOI: https://doi.org/10.1016/j.pmcj.2018.10.008
[8] Redmon, J., Divvala, S., Girshick, R., and Farhadi, A., You only look once: unified, real-time object detection, Proc. IEEE Comput. Soc. Conf. Comput. Vis. Pattern Recognit., pp. 779–788, 2016. DOI: https://doi.org/10.1109/CVPR.2016.91.
[9] Ultralytics, Ultralytics YOLOv8. [online]. 2025 [consultation, May 09th of 2025]. Available at: https://docs.ultralytics.com/models/yolov8/
[10] Wang, C.Y., Yeh, I.H. and M.-Liao, H.Y., YOLOv9: learning what you want to learn using programmable gradient information [online]. 2025 [consultation May 09th of 2025]. Available at: https://arxiv.org/abs/2402.13616
[11] Wang, A., et., al., YOLOv10: real-time end-to-end object detection. advances in neural information processing systems, 37 (NeurIPS), pp. 1–28, 2024. DOI: https://doi.org/10.48550/arXiv.2405.14458
[12] Ultralytics, Ultralytics YOLOv11. [online]. 2025 [consultation May 09th of 2025]. Available at: https://docs.ultralytics.com/models/yolo11/
[13] Tian, Y., Ye, Q., and Doermann D., YOLOv12: attention-centric real-time object detectors, [online]. 2025 [consultation May 09th of 2025]. Available at: https://arxiv.org/abs/2502.12524
[14] Sobek, J., et., al., MedYOLO: a medical image object detection framework. Journal of Imaging Informatics in medicine, pp. 3208–3216, 2024. DOI: https://doi.org/10.1007/s10278-024-01138-2
[15] Liu, Y., et., al., SOCR-YOLO: small objects detection algorithm in medical images. International Journal of Imaging Systems and Technology, 34(4), 2024. DOI: https://doi.org/10.1002/ima.23130
[16] Ajayi, O.G., Ashi, J., and Guda, B., Performance evaluation of YOLO v5 model for automatic crop and weed classification on UAV images. Smart Agricultural Technology, 5(3), art. 100231, 2023. DOI: https://doi.org/10.1016/j.atech.2023.100231
[17] Lippi, M., Bonucci, N., Carpio, R.F., Contarini, M., Speranza, S., and Gasparri, A.A., YOLO-based pest detection system for precision agriculture. In 2021 29th Mediterranean Conference on Control and Automation, MED 2021, Bari, Puglia, Italy, pp. 342–347, 2021. DOI: https://doi.org/10.1109/MED51440.2021.9480344
[18] Omar, M., and Kumar, P., PD-ITS: pothole detection using YOLO variants for intelligent transport system. SN Computer Science, 5(5), 2024. DOI: https://doi.org/10.1007/s42979-024-02887-1
[19] Bučko, B., Lieskovská, E., Zábovská, K., and Zábovský, M. computer vision-based pothole detection under challenging conditions. Sensors, 22(22), pp. 1–18, 2022. DOI: https://doi.org/10.3390/s22228878
[20] Park, S.S., Tran, V.T., and Lee, D.E., Application of various yolo models for computer vision-based real-time pothole detection. Applied Sciences, 11(23), art. 1229, 2021. DOI: https://doi.org/10.3390/app112311229
[21] Wang, S., et., al., Measurement of asphalt pavement crack length using YOLO V5-BiFPN. Journal of Infrastructure Systems, 30(2), pp. 1–10, 2024. DOI: https://doi.org/10.1061/jitse4.iseng-2389
[22] Chen, D.R., and Chiu, W.M., Deep-learning-based road crack detection frameworks for dashcam-captured images under different illumination conditions. Soft Computing, 27(19), pp. 14337–14360, 2023. DOI: https://doi.org/10.1007/s00500-023-08738-0
[23] Yao, H., Liu, Y., Li, X., You, Z., Feng, Y., and Lu, W., A detection method for pavement cracks combining object detection and attention mechanism. IEEE Transactions on Intelligent Transportation Systems, 23(11), pp. 22179–22189, 2022. DOI: https://doi.org/10.1109/TITS.2022.3177210
[24] Souza, A.M., Oliveira, C.E., Decker, P.H.B., Amorim, G.E.R., Correa, A.L.S.C., and Fontenele, H.B., Defect detection using YOLOv8 for determining the condition of asphalt pavements. ALCONPAT, 15(1), pp. 79–91, 2025. DOI: https://doi.org/10.21041/ra.v15i1.781
[25] Yao, H., Fan, Y., Wei, X., Liu, Y., Cao, D., and You, Z. Research and optimization of YOLO-based method for automatic pavement defect detection. Electronic Research Archive, 32(3), pp. 1708–1730, 2024. DOI: https://doi.org/10.3934/ERA.2024078
[26] Du, Y., Pan, N., Xu, Z., Deng, F., Shen, Y., and Kang, H., Pavement distress detection and classification based on YOLO network. International Journal of Pavement Engineering, 22(13), pp. 1659–1672, 2021. DOI: https://doi.org/10.1080/10298436.2020.1714047
[27] Valipour, P.S., Golroo, A., Kheirati, A., Fahmani, M., and Amani, M.J., Automatic pavement distress severity detection using deep learning. Road Materials and Pavement Design, 25(8), pp. 1830–1846, 2023. DOI: https://doi.org/10.1080/14680629.2023.2276422
[28] Ganeshan, D., Sharif, M.S., and Apeagyei, A., road deterioration detection: a machine learning-based system for automated pavement crack identification and analysis. In 2023 International Conference on Innovation and Intelligence for Informatics, Computing, and Technologies, 3ICT 2023, 2023, pp. 188–194. DOI: https://doi.org/10.1109/3ICT60104.2023.10391802
[29] Peraka, N.S.P., Biligiri, K.P., and Kalidindi, S.N., Development of a multi-distress detection system for asphalt pavements: transfer learning-based approach. Transportation Research Record, 2675(10), pp. 538–553, 2021. DOI: https://doi.org/10.1177/03611981211012001
[30] Ferrari, E.C., Garcia, C., Júnior, C.A.P.D.S., and Fontenele, H.B., Classificação do defeito buraco a partir de modelos 3D, in 37o ANPET - Congresso de Pesquisa e Ensino em Transportes, Santos, São Paulo, Brasil, [online], pp. 1–12, 2023. Available at: https://proceedings.science/anpet-2023/trabalhos/classificacao-do-defeito-buraco-a-partir-de-modelos-3d?lang=pt-br
[31] Buslaev, A., Iglovikov, V.I., Khvedchenya, E., Parinov, A., Druzhinin, M., and Kalinin, A.A., Albumentations: fast and flexible image augmentations. Information, 11(2), pp. 1–20, 2020. DOI: https://doi.org/10.3390/info11020125
[32] Terven, J., Córdova-Esparza, D.M., and Romero-González, J.A.A, Comprehensive review of YOLO architectures in computer vision: from YOLOv1 to YOLOv8 and YOLO-NAS. Machine Learning and Knowledge Extraction, 5(4), pp. 1680–1716, 2023. DOI: https://doi.org/10.3390/make5040083
[33] Ranyal, E., Sadhu, A., and Jain, K., Automated pothole condition assessment in pavement using photogrammetry-assisted convolutional neural network. International Journal of Pavement Engineering, 24(1), art. 83401 , 2023. DOI: https://doi.org/10.1080/10298436.2023.2183401
[34] Ranyal, E., Sadhu, A., and Jain, K., Automated pothole condition assessment in pavement using photogrammetry-assisted convolutional neural network. International Journal of Pavement Engineering, 24(1), 83401, 2023. DOI: https://doi.org/10.1080/10298436.2023.2183401
[35] Ren, S., He, K., Girshick, R., and Sun, J., Faster R-CNN: towards real-time object detection with region proposal Networks. In Advances in Neural Information Processing Systems 28 (NIPS 2015), pp. 91–99, 2015. DOI: https://doi.org/10.1109/TPAMI.2016.2577031
[36] Lin, T.Y., Goyal, P., Girshick, R., He, K., and Dollar, P., Focal loss for dense object detection. In IEEE International Conference on Computer Vision (ICCV 2017), pp. 2980–2988, 2017. DOI: https://doi.org/10.1109/ICCV.2017.324
[37] Dong, J., et., al., CBAM-Optimized automatic segmentation and reconstruction system for monocular images with asphalt pavement potholes. IEEE Transactions on Intelligent Transportation Systems, 25(8), pp. 10313–10330, 2024. DOI: https://doi.org/10.1109/TITS.2024.3353257
Cómo citar
IEEE
ACM
ACS
APA
ABNT
Chicago
Harvard
MLA
Turabian
Vancouver
Descargar cita
CrossRef Cited-by
1. Kevin Mathew T, Naveen Antony E, Jayabharathi P. (2026). Deep Learning Based Pothole Detection and Segmentation with YOLOv11. 2026 International Conference on Innovative Computing, Intelligent Communication and Smart Electrical Systems (ICSES). , p.1. https://doi.org/10.1109/ICSES66558.2026.11478967.
Dimensions
PlumX
Visitas a la página del resumen del artículo
Descargas
Licencia
Derechos de autor 2025 DYNA

Esta obra está bajo una licencia internacional Creative Commons Atribución-NoComercial-SinDerivadas 4.0.
El autor o autores de un artículo aceptado para publicación en cualquiera de las revistas editadas por la facultad de Minas cederán la totalidad de los derechos patrimoniales a la Universidad Nacional de Colombia de manera gratuita, dentro de los cuáles se incluyen: el derecho a editar, publicar, reproducir y distribuir tanto en medios impresos como digitales, además de incluir en artículo en índices internacionales y/o bases de datos, de igual manera, se faculta a la editorial para utilizar las imágenes, tablas y/o cualquier material gráfico presentado en el artículo para el diseño de carátulas o posters de la misma revista.













