


Publicado
Morphological Synthesis and workspace design for a parallel manipulator with linear actuators
Síntesis morfológica y dimensional de un manipulador paralelo con actuadores lineales
DOI:
https://doi.org/10.15446/dyna.v87n213.80676Palabras clave:
dimensional synthesis, kinematics design, morphological synthesis, parallel manipulator, workspace (en)diseño cinemático, espacio de trabajo, manipulador paralelo, síntesis dimensional, síntesis morfológica (es)
Descargas
This paper addresses the kinematic structure and workspace analysis of a parallel manipulator with linear actuators considering two studies.
The first one was based on a morphological synthesis in which a kinematic connections approach was implemented. The set of combinations of joints and links for the desired system and their linkage are illustrated. Finally, the development regarding the conceivable morphology
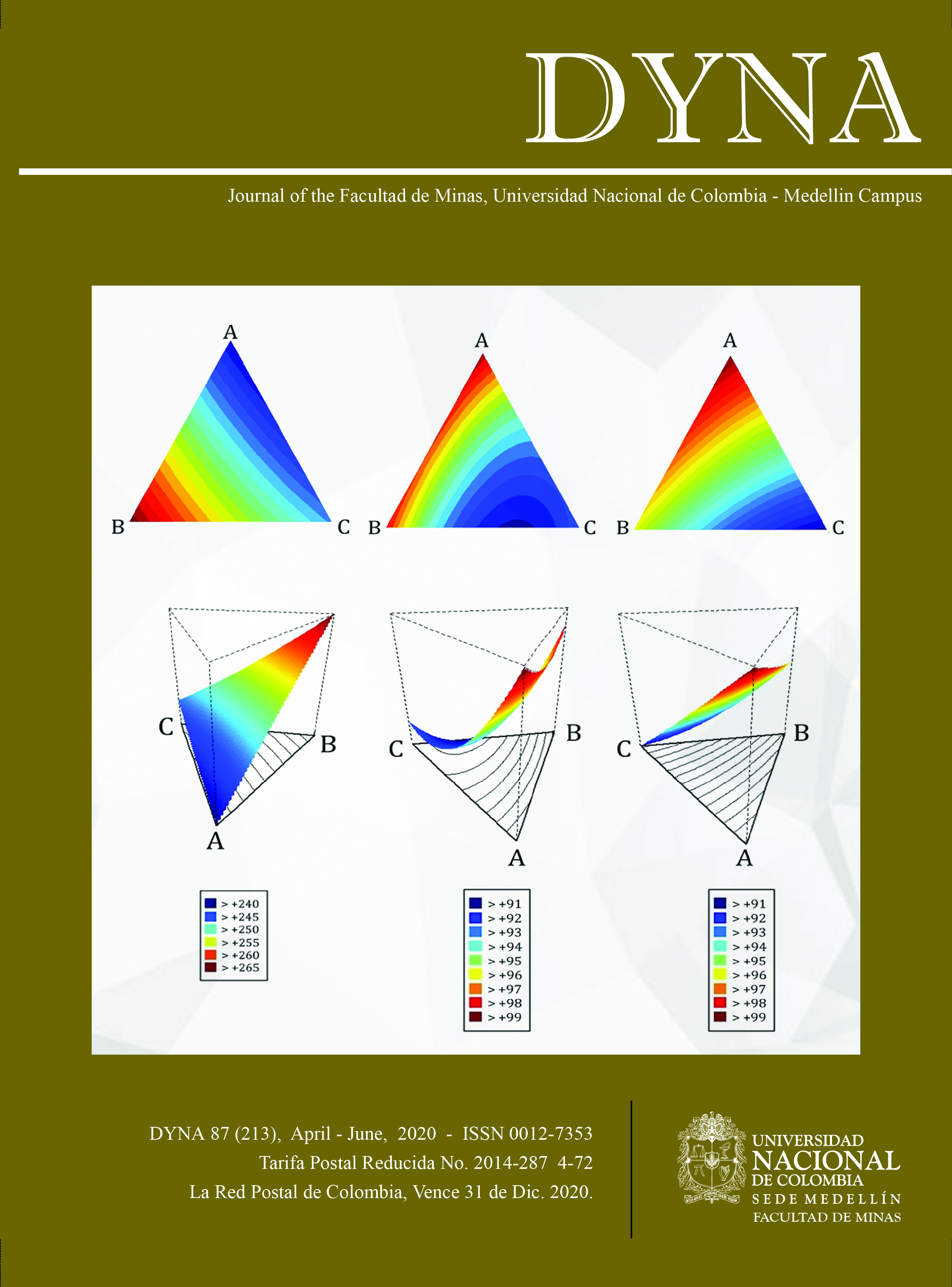
is detailed, providing three linear degrees of freedom between the mobile and fixed platforms. The second study presented the dimensional synthesis of the manipulator, considering a workspace required and an input transmission index. The geometrical design was based on the maximum inscribed workspace volume; the cylindrical shape radius inscribed on a workspace intersection is also exemplified. The geometric determination of the workspace for the manipulator was demonstrated using computer-aided design. A design result of the Delta as checked with the stiffness and condition indices.
Este artículo aborda el análisis cinemático y el espacio de trabajo de un manipulador paralelo con actuadores lineales considerando dos estudios. El primero trata sobre la síntesis morfológica, implementando un acercamiento por medio del método de juntas cinemáticas. Son ilustrados el conjunto de combinaciones de las juntas y pares para el sistema deseado y sus relaciones. Finalmente, se detalla el desarrollo de la morfología concebida, la cual provee tres grados de libertad lineales entre la plataforma fija y móvil. El segundo estudio presenta la síntesis dimensional del manipulador, considerando un espacio de trabajo requerido y un índice de trasmisión de entrada. El diseño geométrico utiliza el máximo volumen de trabajo inscrito; se muestra la geometría cilíndrica inscrita en la intersección con espacio de trabajo. Se determina la geometría del espacio de trabajo utilizando CAD y el diseño resultante del Delta es verificado con el índice de rigidez y de condición.
Referencias
Zhang, D., Parallel robotic machine tools. Springer, New York, USA, 2010.
Lou, Y., Liu, G., Xu, J. and Li, Z., A general approach for optimal kinematic design of parallel manipulators. IEEE International Conference on Robotics and Automation, IEEE, New Orleans, LA, USA, pp. 3659-3664, 2014. DOI: 10.1017/S0263574719001577
Hesse, S., Modular pick-and-place devices. From the series Blue Digest on Automation. FESTO AG & Co, Esslingen, Germany, 2000.
Tam, T., Open Beam, [online]. Redmond, WA. [cited: July 10th of 2017]. Available at: URL:http://www.openbeamusa.com/.
Wygant, S., SeeMeCNC Team Stefan, [online]. Ligonier, Indiana, USA. [cited: July 10th of 2017]. Available at: URL:https://www.seemecnc.com/
Dinga, H., Fenga, Z., Yang, W. and Kecskeméthy, A., Structure synthesis of 6-DOF forging manipulators, Mechanism and Machine Theory, 111, pp. 135-151, 2017. DOI: 10.1016/j.mechmachtheory.2017.01.001
Kong, X. and Gosselin, C. ,Type synthesis of 3-DOF Translational parallel manipulators based on screw theory, ASME Journal of Mechanical Design, 126 pp. 83-92, 2004. DOI: 10.1115/1.1637662
Lee, C.C. and Hervé, J.M., On the enumeration of schoenflies motion generators, Proceedings of The 9th IFToMM International Symposium on Theory of Machines and Mechanisms, Bucharest, Romania, 2005.
Rezaei, A. and Akbarzadeh, A., Study on Jacobian, singularity and kinematics sensitivity of the FUM 3-PSP parallel manipulator, Mechanism and Machine Theory 86, pp. 211-234, 2015. DOI: 10.1016/j.mechmachtheory.2014.11.009
Meng, J., Liu, G. and Li, Z., A Geometric theory for analysis and synthesis of Sub-6 DOF parallel manipulators. IEEE Transactions on Robotics and Automation 24, pp. 625-649, 2007. DOI: 10.1109/TRO.2007.898995
Gogu, G., Structural synthesis of fully-isotropic translational parallel robots via theory of linear transformations, European Journal of Mechanics A/Solids 23, pp. 1021-1039, 2004. DOI: 10.1016/j.euromechsol.2004.08.006
Goldsztejna, A., Caro, S. and Chabert, G., A three-step methodology for dimensional tolerance synthesis of parallel manipulators, Mechanism and Machine Theory, pp. 213-234. 2016. DOI: 10.1016/j.mechmachtheory.2016.06.013
Gogu, G., Fully-isotropic parallel manipulators with five degrees of freedom, IEEE International Conference on Robotics and Automation. Orlando, Florida, USA, 2006, pp. 1141-1146. DOI: 10.1109/ROBOT.2006.1641864
Dolga, V. and Dolga, L., The structural synthesis of the parallel robots. Mechanika 17, pp. 288-295, 2011. DOI: 10.5755/j01.mech.17.3.505
Tsai, L.W., Robot analysis: the mechanics of serial and parallel manipulators. Wiley, New York, USA, 1999.
Liu, X.J. and Wang, J., Parallel kinematics: type, kinematics, and optimal design. Springer, New York, USA, 2014.
Liu, X.J., Wang, J. and Oh, K.K., A New approach to the design of a DELTA robot with a desired workspace. Journal of Intelligent and Robotic Systems, pp. 209, 2004. DOI: 10.1023/B:JINT.0000015403.67717.68
Tao, D.C., Applied linkage synthesis. Addison-Wesley, Reading, 1964, pp. 7-12.
Sharma, C.S. and Purohit, K., Theory of mechanisms and machines. Eastern Economy eds. Prentice-Hall, New Delhi, India, 2006.
Martin, G.H., Kinematics and dynamics of machines. McGraw-Hill, New York, USA, 1982.
Gao, Z., Zhang, D., Hu, X. and Ge. Y., Design, analysis and stiffness optimization of a three degree of freedom parallel manipulator, Robotica, 28, pp. 349-357, 2010. DOI: 10.1017/S0263574709005657
Kelaiaia, R., Company, O. and Zaatri, A., Multiobjective optimization of a linear Delta parallel robot, Mech. Mach. Theory, 50, pp. 159-178, 2012. DOI: 10.1016/j.mechmachtheory.2011.11.004
Liu, X.J., Wang, J. and Gao, F., Performance atlases of the workspace for planar 3-DOF parallel manipulators. Robotica, 18, pp. 563-568, 2000. DOI: 10.1017/S0263574700002678
Liu, X.J., Wang, J. and Zeng, H., Workspace atlases for the computer - aided design of the Delta Robot. Journal of Mechanical Engineering Science, 217, pp. 861-869, 2003. DOI: 10.1243/095440603322310413
Arsenault, M. and Boudreau, R., Synthesis of planar parallel mechanisms while considering workspace, dexterity, stiffness and singularity avoidance, Journal of Mechanical Design, 128, pp. 69, 2006. DOI: 10.1115/1.2121747
Cao, W., Yang, D. and Ding, H., A method for stiffness analysis of overconstrained parallel robotic mechanisms with Scara motion, Robotics and Computer-Integrated Manufacturing 128, pp. 426-435, 2018. DOI: 10.1016/j.rcim.2017.08.014
Gabardi, M., Solazzi, M. and Frisoli, A., An optimization procedure based on kinematics analysis for the design parameters of a 4-UPU parallel manipulator, Mechanisms and Machine Theory 133, pp. 211-228, 2019. DOI: 10.1016/j.mechmachtheory.2018.11.015
Raoofian, A., Taghvaeipour, A. and Kamali A., On the stiffness analysis of robotic manipulators and calculation of stiffness indices, Mechanism and Machine Theory, 130, pp. 382-402, 2018. DOI: 10.1016/j.mechmachtheory.2018.08.025
Itul, T., Gherman, B. and Pîsla, D., Comparative study of Two 2-DOF parallel mechanisms used for orientation, Mechanisms and Machine Science, 18, pp 145-157, 2014. DOI: 10.1007/978-3-319-01845-4_15
Liu, X.J., Jin, Z.L. and Gao, F., Optimum design of 3-DOF spherical parallel manipulators with respect to the conditioning and stiffness indices, Mechanism and Machine Theory 35, pp. 1257-1267, 2000. DOI: 10.1016/S0094-114X(99)00072-5
Pashkevich, A., Chablat, D. and Wenger, P., Stiffness analysis of overconstrained parallel manipulators. Mechanism and Machine Theory 44, pp. 966-982, 2009. DOI: 10.1016/j.mechmachtheory.2008.05.017
Quintero, H.F., Mejia, L.A., Holguin, G., Diaz M.A., Herrera M, Mesa, C.A, and Daraviña, D., Manipuladores paralelos, síntesis, análisis y aplicaciones, Universidad Tecnológica de Pereira, Pereira, Colombia, 2018, pp. 137-146.
Quintero, H.F., Mejia, L.A. and Diaz, M.A., Synthesis of planar parallel manipulators including dexterity, force transmission and stiffness index, Mechanics Based Design of Structures and Machines, 2019. DOI: 10.1080/15397734.2019.1615503
Cómo citar
IEEE
ACM
ACS
APA
ABNT
Chicago
Harvard
MLA
Turabian
Vancouver
Descargar cita
Licencia
Derechos de autor 2020 DYNA

Esta obra está bajo una licencia internacional Creative Commons Atribución-NoComercial-SinDerivadas 4.0.
El autor o autores de un artículo aceptado para publicación en cualquiera de las revistas editadas por la facultad de Minas cederán la totalidad de los derechos patrimoniales a la Universidad Nacional de Colombia de manera gratuita, dentro de los cuáles se incluyen: el derecho a editar, publicar, reproducir y distribuir tanto en medios impresos como digitales, además de incluir en artículo en índices internacionales y/o bases de datos, de igual manera, se faculta a la editorial para utilizar las imágenes, tablas y/o cualquier material gráfico presentado en el artículo para el diseño de carátulas o posters de la misma revista.













