


Published
Implementing condition-based maintenance using modeling and simulation: a case study of a permanent magnet synchronous motor
Implementación de un mantenimiento basado en la condición usando modelado y simulación: caso de estudio de un motor sin-crónico de imanes permanentes
DOI:
https://doi.org/10.15446/ing.investig.v31n2.23461Keywords:
condition-based maintenance, fault detection, neuronal networks, permanent magnet synchronous motor. (en)detección de fallas, mantenimiento basado en la condición, motor sincrónico de imanes permanentes, redes neuronales. (es)
Downloads
This paper introduces condition-based maintenance (CBM) architecture regarding an electrical application. Appropriate and efficient fault detection constitutes one of the major challenges associated with CBM and a model-based approach constitutes the way to achieve it. A case study using a permanent magnet synchronous motor (PMSM) is presented to illustrate implementing CBM using a neural network motor model. CBM may be implemented in real time using Matlab and dSpace. The difference between line currents' negative sequence components, predicted by a multilayer neural network, and the current values acquired from the motor is used as fault indicator. Experimental results have shown the efficiency of the proposed model in detecting several stator winding short faults in differing load conditions and fault severity, obtaining up to 95% reliability.
Este artículo introduce la arquitectura de un CBM (mantenimiento basado en la condición) en una aplicación eléctrica. La detección de fallas de manera oportuna y eficiente constituye uno de los retos más importantes asociados al CBM y el enfoque basado en modelos en el medio para conseguirlo. Un caso de estudio en un motor sincrónico de imanes permanentes (PMSM) es ejecutado para ilustrar cómo el modelado es utilizado en la implementación de un CBM. El monitoreo fue implementado en tiempo real usando Matlab® y dSpace®. Se emplea como indicadora de falla la diferencia entre los valores de la componente secuencial negativa para las corrientes predichas usando una red neuronal multicapa y la corriente obtenida del motor. Resultados experimentales demostraron la efectividad del modelo propuesto en la detección de la falla de cortocircuito en el estator en distintos niveles de severidad y carga, obteniendo una confiabilidad en la detección mayor al 95%.
Implementación de un mantenimiento basado en la condición usando modelado y simulación: caso de estudio de un motor sincrónico de imanes permanentes
Implementing condition-based maintenance using modeling and simulation: a case study of a permanent magnet synchronous motor
Jabid Quiroga Méndez1, Silvia Oviedo Castillo2
1 Ingeniero Mecánico, Universidad Industrial de Santander, Colombia. Magíster en Ingeniería Mecánica, Florida State University, Estados Unidos. Profesor asociado, Universidad Industrial de Santander. jabib@uis.edu.co
2 Ingeniera Electrónica, Universidad Industrial de Santander. Candidata a Magister en Ingeniería Mecánica, Universidad Industrial de Santander, Colombia. siljuovi@uis.edu.co
RESUMEN
Este artículo introduce la arquitectura de un CBM (mantenimiento basado en la condición) en una aplicación eléctrica. La detección de fallas de manera oportuna y eficiente constituye uno de los retos más importantes asociados al CBM y el enfoque basado en modelos en el medio para conseguirlo. Un caso de estudio en un motor sincrónico de imanes permanentes (PMSM) es ejecutado para ilustrar cómo el modelado es utilizado en la implementación de un CBM. El monitoreo fue implementado en tiempo real usando Matlab® y dSpace®. Se emplea como indicadora de falla la diferencia entre los valores de la componente secuencial negativa para las corrientes predichas usando una red neuronal multicapa y la corriente obtenida del motor. Resultados experimentales demostraron la efectividad del modelo propuesto en la detección de la falla de cortocircuito en el estator en distintos niveles de severidad y carga, obteniendo una confiabilidad en la detección mayor al 95%.
Palabras clave: detección de fallas, mantenimiento basado en la condición, motor sincrónico de imanes permanentes , redes neuronales.
ABSTRACT
This paper introduces condition-based maintenance (CBM) architecture regarding an electrical application. Appropriate and efficient fault detection constitutes one of the major challenges associated with CBM and a modelbased approach constitutes the way to achieve it. A case study using a permanent magnet synchronous motor (PMSM) is presented to illustrate implementing CBM using a neural network motor model. CBM may be implemented in real time using Matlab and dSpace. The difference between line currents´ negative sequence components, predicted by a multilayer neural network, and the current values acquired from the motor is used as fault indicator. Experimental results have shown the efficiency of the proposed model in detecting several stator winding short faults in differing load conditions and fault severity, obtaining up to 95% reliability.
Recibido: enero 20 de 2010
Aceptado: mayo 31 de 2011
Introducción
El avance tecnológico ha impulsado el desarrollo de sistemas cada vez más complejos. Esta complejidad también se asocia a las tareas de mantenimiento, lo cual exige la implementación de sistemas inteligentes que permitan la optimización de las tareas de monitoreo.
La gestión en mantenimiento procura reducir costos asociados al mantenimiento, en particular horas/hombre, y costos de reparación. Varias metodologías han sido empleadas para el logro de estos objetivos, tales como TPM (Total Productive Maintenance), RCA (Root Cause Analysis), mantenimiento preventivo, entre otras.
Convencionalmente, el mantenimiento en el ámbito industrial ha sido implementado bajo enfoques correctivos o reactivos y preventivos. En el enfoque reactivo el mantenimiento se ejecuta cuando la falla de un componente o del sistema en general es obvia o el sistema colapsa. Un método tradicional alternativo es el mantenimiento basado en el tiempo de operación, en el cual el equipo es intervenido basado en el tiempo acumulado de operación. En este caso se asume un tiempo promedio entre fallas, estadísticamente establecido, basado en el histórico de fallas del equipo cuando éste opera en condiciones normales. Obviamente, dicho enfoque de mantenimiento involucra la detención del equipo, lo que puede producir afectaciones innecesarias cuando él no requiera una acción correctiva, generando pérdidas en producción y horas/hombre. Por otro lado, el CBM plantea un esquema de mantenimiento que evita detener el equipo de forma innecesaria.
En un sistema CBM la condición del equipo es evaluada en tiempo real. Por lo general los métodos CBM se clasifican en: basados en modelos, basados en conocimiento y basados en señales. El método usado en este caso de estudio pertenece al basado en el modelo, en el cual se usa la redundancia analítica en lugar de la redundancia física (Kim y Parlos, 2002). El principal beneficio del enfoque basado en modelo radica en la simplificación de la evaluación de la información procesada. Adicionalmente este enfoque logra una mayor capacidad de diagnóstico basado en un conocimiento más profundo del comportamiento del sistema. Sin embargo, esa aproximación implica ciertas desventajas a mencionar, como la necesidad de un modelo lo suficientemente exacto y robusto que evite los falsos positivos (Liu, 2006). Por lo tanto, el modelado se constituye en una prioridad en la implementación de este tipo de CBM. Los modelos embebidos en los sistemas CBM usualmente corresponden a modelos del sistema cuando éste opera sin falla simulando las condiciones normales de operación.
Este artículo presenta los conceptos fundamentales y el alcance técnico asociado al CBM. También se ilustra el papel fundamental del modelado cuando el enfoque del CBM se basa en el modelo del sistema, y se proporciona un ejemplo de CBM implementado en un PMSM utilizado para la detección de un cortocircuito en el devanado del estator.
Estructura conceptual de un CBM
Un sistema de mantenimiento efectivo debe proveer información específica sobre el estado del sistema y sus posibles condiciones anormales, por lo cual es necesario un monitoreo en línea que asegure la información actualizada del equipo y con ella determinar la condición del equipo y las necesidades de mantenimiento. El desarrollo de estas funciones se logra por medio de tareas que comienzan con la captura de las señales provenientes del sistema, sigue con el análisis de la información contenida en cada una de las señales, que se comparan con la información analítica establecida bajo la condición normal, y finaliza prediciendo la condición futura del sistema basado en el comportamiento histórico asociado a ciertas condiciones de falla. El esquema general de un sistema típico CBM basado en modelo es ilustrado en la figura 1.

El sistema monitorea continuamente en tiempo real las variables que conforman el indicador de falla con el cual se evalúa la condición del equipo. El sistema utiliza la información suministrada en el monitoreo para predecir la necesidad de mantenimiento correctivo. Como se muestra en la figura 1, el CBM contiene los siguientes módulos:
- Módulo de sensores para la captura de las señales objeto del monitoreo (vibración, corriente eléctrica, temperatura).
- Sistema de adquisición y procesamiento de señales, en el que las señales son analizadas en busca de los rasgos de falla con propósitos de detección.
- El modelo analítico del sistema monitoreado donde se genera un valor de predicción de una determinada variable medible, comparado con el valor real de dicha variable para producir el residuo, base de la detección y el diagnóstico.
- Módulo de detección de falla, en el cual se comparan los residuos con umbrales preestablecidos estadísticamente en condiciones normales y, a partir de esta correlación, se establece el juicio de la condición del sistema.
Modelado y simulación
Como se puede inferir de la figura 1, la clave para un CBM exitoso es la evaluación efectiva de la condición del equipo basada en un modelo analítico eficaz. La detección temprana de la falla mediante dicho modelo permitirá la programación del personal de mantenimiento para la intervención del equipo evitando un mayor efecto negativo e inclusive pérdidas de activos o inclusive vidas. En este caso de estudio el sistema o activo a evaluar es un motor sincrónico de imanes permanentes. Los motores sincrónicos de imanes permanentes son una clase de motor eléctrico en auge por cuanto el uso de imanes permanentes en lugar del campo magnético inducido permite una mayor densidad energética del equipo comparada con el popular motor de inducción. En la siguiente sección se presenta en detalle el modelo tipo caja negra implementado y embebido en un CBM para la detección de un cortocircuito en el devanado del estator.
Metodología
El proceso de falla en un PMSM
El incremento del uso de motores eléctricos tipo PMSM en aplicaciones de alta y baja potencia se ha sustentado en su desempeño y eficiencia. El PMSM provee varias ventajas cuando es comparado con los motores de inducción, el actuador eléctrico más difundido, tales como: alta densidad de potencia, bajo peso, menores consumos de potencia asociados a la inducción del campo magnético y un rotor más pequeño para la misma potencia de salida. Estas ventajas se derivan del hecho de que el campo de la armadura es suministrado por imanes permanentes ubicados en la superficie del rotor con la subsecuente eliminación del bobinado en la armadura. De esta forma la armadura provee un mayor flujo magnético para similares espacios entrehierros, lo que resulta en un mayor torque para un menor volumen y corriente. Los PMSM son denominados actuadores sincrónicos debido a que el campo magnético del rotor rota a la misma velocidad (velocidad sincrónica) del campo magnético del estator.
Los PMSM, como cualquier equipo eléctrico, son proclives a fallar después de cierto tiempo de operación. Estadísticas muestran que fallas en el bobinado del estator constituyen la mayor proporción de las fallas eléctricas (Ojo et al., 2002). Las fallas en el devanado usualmente se inician como fallas indetectables entre espiras adyacentes y posteriormente se desarrolla en un cortocircuito, comprometiendo un mayor número de espiras. Las fallas en el devanado en una bobina pueden tener poco efecto en el desempeño del motor pero afectan su confiabilidad, disponibilidad y longevidad (Awadallah y Morcos, 2004). Aunque la falla se inicia muy levemente y es casi indetectable, rápidamente puede evolucionar hacia una falla más severa. La elevada corriente originada por el aumento de la severidad de la falla puede eventualmente provocar la pérdida de una fase del embobinado y producir cortocircuito entre las fases y tierra.
Las causas de cortocircuito en el embobinado del estator se resumen a continuación (Bonnet y Soukup, 1992; Nandy et al., 2005):
- - En el arranque del motor el aislante del embobinado es deteriorado por la sobretensión producida por esta condición transitoria.
- Desbalances y sobretensiones, que producen incremento en la temperatura del embobinado y deterioro del aislamiento.
- Descargas eléctricas.
- Ambiente agresivo provocado por: contaminación, humedad, químicos y una alta temperatura del motor, condiciones que debilitan el aislamiento.
En las próximas secciones el modelo desarrollado es introducido junto con los resultados experimentales obtenidos cuando se somete al motor a distintos escenarios de falla.
Desarrollo del modelo
Como se mencionó, entre los aspectos claves en un modelo analítico con fines de ser utilizado en un CBM están su precisión y robustez. Las anteriores características buscan disminuir o, en el mejor de los casos, eliminar completamente los posibles falsos positivos en el monitoreo del equipo. En el caso específico del cortocircuito en el devanado del estator del PMSM, la condición anormal es explícita en la simetría de las corrientes de línea, por lo tanto el modelado con propósitos de detección de esta condición debe ser orientado hacia la determinación analítica de los valores de corriente en condiciones normales de operación, los cuales al ser comparados con los valores reales producirán una diferencia (residuos), base de detección de la falla. Debido a la complejidad del comportamiento dinámico del PMSM en operación normal, a los transitorios producidos bajo fluctuaciones de carga, y a la dificultad asociada a la formulación de un modelo analítico explícito del motor usando métodos convencionales, se implementó un modelo empírico no lineal para determinar las corrientes de línea a partir de los voltajes de línea y la velocidad del motor usando redes neuronales (Quiroga et al., 2009). La arquitectura de la red neuronal corresponde a una red recurrente dinámica multicapas con retroalimentación local y global, como se muestra en la figura 2.

En la red propuesta la retroalimentación local se produce en la capa oculta, mientras que la retroalimentación global es producida conectando las salidas de la red con las entradas de ésta.
La red implementada consta de una capa de entrada, una capa oculta y una de salida. En esta propuesta de red se utiliza la función tansig en la capa oculta y purelin en la capa de salida. El vector de entrada a la red U(t), se compone de valores actuales y pasados de las señales normalizadas de las tres tensiones de línea (Vab, Vbc, Vca), las tres corrientes de fase normalizadas y predichas, así como los valores normalizados de la velocidad de rotación del motor (figura 2).
Como puede observarse en la figura 2, la capa oculta posee seis neuronas con retroalimentación local en cada una de éstas. La capa de salida con retroalimentación global tiene tres nodos, correspondientes a las tres fases predichas un tiempo adelante.
Por otra parte, las condiciones iníciales del entrenamiento son establecidas según el algoritmo propuesto por Nguyen-Widrow (1990). El desempeño de la red en la fase de entrenamiento es evaluado usando el error medio cuadrado (MSE). La función de entrenamiento usada actualiza los pesos y "bias" de acuerdo con el proceso de optimización de Levenberg-Marquardt, el cual asegura en la red buenas capacidades de generalización, es decir, que la red produzca salidas aceptables cuando ésta es alimentada con información que no hizo parte del entrenamiento (Foresee y Hagan, 1997).
Generación de residuos
Los residuos son la base de la estrategia de detección del CBM y se producen mediante la comparación entre las salidas de la red neuronal y los valores de las tres corrientes de línea medidas. Teóricamente los residuos son pequeños durante la operación normal del motor. Sin embargo, los residuos generados bajo condiciones de falla aumentan considerablemente con respecto a los obtenidos en condición normal. El residuo para la fase A (fase B y C son similares) se expresa como:
 | [1] |
Donde  es el valor actual normalizado de la corriente de la fase A en el tiempo t e
es el valor actual normalizado de la corriente de la fase A en el tiempo t e  es el valor predicho de la corriente de la fase A en el tiempo t.
es el valor predicho de la corriente de la fase A en el tiempo t.
La figura 3 presenta un diagrama detallado del FDD (Fault Detection and Diagnosis) implementado a partir de la estructura del CBM descrito. El monitoreo de los valores de corriente de secuencia negativa permite establecer si existe o no un fallo por medio de la evaluación de los residuos. En caso de presentarse un fallo el proceso de diagnóstico permitiría establecer la locación y magnitud de él.

Análisis de corriente de secuencia negativa
La falla objeto de este estudio se manifiesta con un desbalance (asimetría) en las corrientes de línea del motor. Tal asimetría se manifiesta con un cambio en la magnitud de la corriente de secuencia negativa. Analítica y experimentalmente se ha demostrado un incremento en la magnitud de la corriente de secuencia negativa cuando las máquinas eléctricas presentan cortocircuito en el devanado del estator (Williamson y Mirzoian, 1985). La magnitud de la corriente de secuencia negativa la2 se obtiene mediante las señales fundamentales de corriente y empleando (2):
 | [2] |
donde la,f , lb,f y lc,f son las magnitudes de los componentes fundamentales de la señal trifásica de corriente y α es un operador rotacional de fase equivalente a ei 2π/3 o 120°.
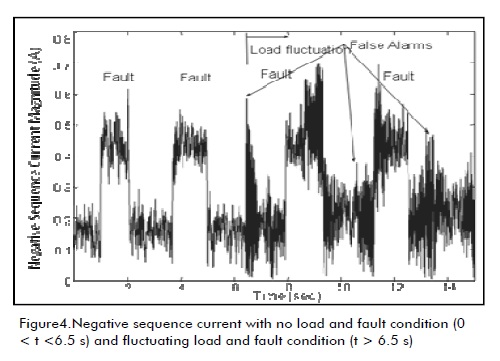
Experimentos en el laboratorio demostraron que el control de velocidad asociado a la operación del PMSM cuando éste opera bajo fluctuaciones de carga genera componentes de alta frecuencia en el componente secuencial negativo de la corriente en una magnitud suficiente para producir falsos positivos (figura 4).

El uso de un modelo predictor de los valores de corriente obtenidos bajo condiciones normales y de fluctuación de carga permite aumentar la robustez del componente secuencial negativo de la corriente, debido a que si el modelo replica el comportamiento del motor bajo fluctuaciones de carga los residuos producidos bajo esta condición serán pequeños y no afectarán significativamente la determinación del componente secuencial negativo de la corriente. Por lo tanto, en procura de obtener un sistema de detección de cortocircuito robusto se propone la implementación del componente secuencial negativo de los residuos ra,2, determinado usando (3), y que en el CBM propuesto operará como indicador de falla.
Resultados Experimentales
El CBM propuesto es validado en un PMSM de 11,25 kW, 640V, 60Hz, conectado en Y con 8 polos. Un motor D.C. es conectado mecánicamente al PMSM con el fin de simular la carga. Durante los experimentos, la carga es cambiada variando la resistencia de la armadura del motor D.C., emulando la fluctuación de carga.
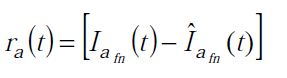
El banco de pruebas está diseñado para imitar diferentes niveles de severidad del cortocircuito en el devanado del estator, de manera que éste ha sido adecuado, como se muestra en la figura 5. Los diversos grados de severidad de la falla pueden ser emulados cerrando distintos pares de conexiones, lo que puede ser observado mediante el monitoreo de la corriente de falla generada en el lazo del cortocircuito. El banco de pruebas utilizado sólo tiene dos conexiones para producir el cortocircuito, ubicadas en la fase A, las cuales proporcionan fallas equivalentes a un cortocircuito del 6,25% y 12,5% del total del devanado de la respectiva fase.

Con el propósito de producir una condición menos severa de falla (falla incipiente), una resistencia variable ha sido usada, como se observa en la figura 5. El cambio en el nivel de severidad del cortocircuito en el devanado del estator puede ser imitado con el ajuste del valor de la resistencia, lo cual se refleja en la variación de la corriente en el lazo del cortocircuito y en la magnitud de la asimetría en las corrientes establecida, tal y como se muestra en la tabla 1.
Una serie de pruebas es efectuada para demostrar el desempeño del sistema implementado en la detección de cortocircuito del devanado del estator intentando cubrir una amplia variedad de condiciones de operación a diversos niveles de falla y condiciones de carga. Sin embargo, debido a limitaciones de espacio, sólo se presentarán dos casos típicos. El primer caso corresponde a una falla cuya corriente de lazo es 25 A y una fluctuación de carga entre ningún torque externo aplicado y el 30% del torque nominal del motor. Este experimento es efectuado para demostrar la capacidad de detección del CBM propuesto cuando el motor opera en condición de falla incipiente menor al 6,25% de cortocircuito en la fase A. La falla es aplicada dos veces y la corriente secuencial negativa de los residuos es obtenida como se muestra en la figura 6.

En la figura 6 puede observarse que el sistema es efectivo, distinguiendo las condiciones normales y de falla aun en una fluctuación transitoria de carga. Adicionalmente, la magnitud del componente secuencial negativo de los residuos en condición de falla presenta pequeños cambios causados por la desviación en la predicción del valor de corriente por parte de la red neuronal. Sin embargo, las variaciones no son significativas y el sistema detecta la falla satisfactoriamente. El segundo caso corresponde a una corriente de lazo de 41 A y una fluctuación de carga entre ningún torque externo aplicado y un 45% del torque nominal del motor. En este caso la falla es aplicada en tres ocasiones (figura 7). Comparando los resultados obtenidos en los dos casos puede observarse un mayor valor del componente secuencial negativo de los residuos como resultado de una condición de falla más severa en el escenario correspondiente.

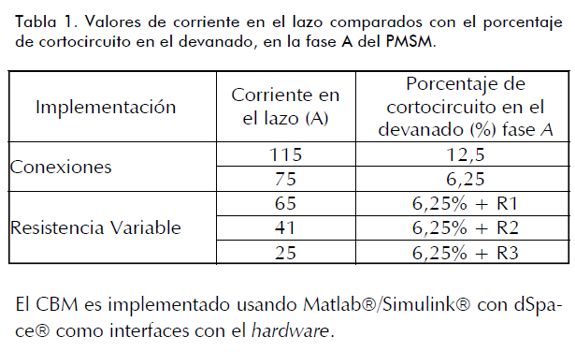
Adicionalmente, en sucesivas pruebas efectuadas variando la severidad de carga se manifestó la relación entre la magnitud del indicador de falla obtenido y el grado de severidad de la falla. Esta relación se ilustra en la tabla 2 y en la figura 8, donde se puede apreciar el incremento de la magnitud del componente secuencial negativo de los residuos con la corriente de lazo, lo que corresponde al incremento del indicador de falla con la severidad de ésta.

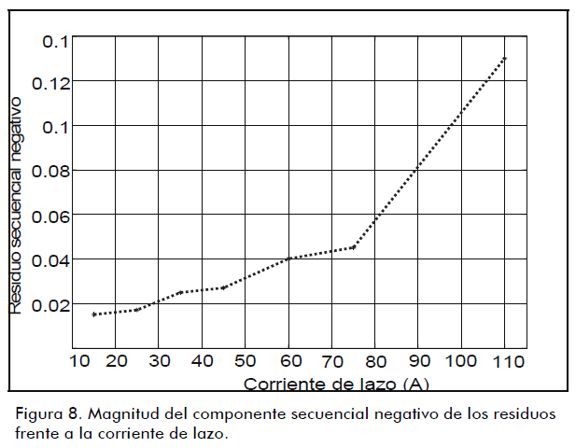
El porcentaje de incremento de ra,2 en la tabla 2 se determina usando (8):
 | [8] |
donde x es el valor actual de ra,2 y x0 es el valor de ra,2 en condición sin falla.
Conclusiones
El diagnóstico temprano de las fallas en las máquinas eléctricas es de vital importancia en la industria, por lo que aquellos esquemas que permitan un análisis acertado y confiable sin requerir el detenimiento de la maquinaria para su posterior análisis son objeto de estudio y esfuerzos encaminados a la mejora de la confiabilidad de los sistemas de monitoreo y detección de fallas. El mantenimiento basado en la condición propone la detección de fallas cuando todavía no tienen una severidad perjudicial, evaluando indicadores obtenidos a partir de las características dinámicas de las señales tomadas de las máquinas evaluadas cuando están en marcha.
En el caso de estudio de un PMSM se implementó un CBM empleando como indicador para la evaluación de la falla (cortocircuito en el devanado del estator) la diferencia entre los valores de la componente negativa de las corrientes de línea predichas por una red neuronal multicapa y los valores de corrientes capturados desde el motor en tiempo real. Se implementó un modelado exitoso con dicha red, obteniéndose detecciones efectivas ante diferentes condiciones de carga fluctuante. Los experimentos permitieron obtener la relación entre el grado de severidad de la falla y la magnitud del indicador de falla.
Este caso de estudio es una referencia para estudios posteriores con miras al modelado del motor con el propósito de monitorear otras condiciones de falla como barras rotas, fallas en rodamientos y excentricidad del estator, entre otras.
Referencias
Awadallah, M.A., Morcos, M. M., ANFIS-based diagnosis and location of stator interturn faults in PM brushless DC motors., IEEE Trans. Energy Conversion, Vol. 19, No. 4, 2004, pp. 795–796.
Bonnett, A.H., Soukup, G.C., Cause and analysis of stator and rotor failures in three-phase squirrel-cage induction motors., IEEE Transactions on Industry Applications, Vol.28, No.4, Jul/Aug 1992, pp.921-937.
Foresee, F.D., Hagan, M.T., Gauss-Newton approximation to Bayesian regularization., Proceedings of the 1997 International Joint Conference on Neural Networks, 1997, pp. 1930–1935.
Kim, K., Parlos, A., G., Induction Motor Fault Diagnosis Based on Neuropredictors and Wavelet Signal Processing., IEEE/ASME Transactions on Mechatronics, Vol. 7, No 2, June 2002, pp 201-219.
Liu, L., Robust fault detection and diagnosis for permanent magnet synchronous motors., Ph.D. dissertation, Dept. Mech. Eng., Florida State University, Tallahassee, FL, 2006.
Nandi, S., Toliyat, H.A., Xiaodong, L., Condition monitoring and fault diagnosis of electrical motors-a review., IEEE Transaction on Energy Conversion, vol.20, no.4, pp. 719-729, Dec.2005
Nguyen, D., Widrow, B., Improving the learning speed of 2-layer neural networks by choosing initial values of the adaptive weights., Proceedings of the International Joint Conference on Neural Networks, Vol. 3, 1990, pp. 21–26.
Ojo, O., Osaloni O., Kshirsagar P., Models for the control and simulation of synchronous type machine drives under various fault conditions., in 2002 Conference Record Ind. Applicat, 2002.
Quiroga, J., Cortes, D., Edrington, C., Neural Network Based System Identification of a PMSM Under Load Fluctuation., Revista DYNA, vol 76, no. 160, pp. 273-283, Dec. 2009.
Williamson, S., Mirzoian, K., Analysis of cage induction motors with stator windings faults., IEEE Transactions Power App. Systems, Vol. 104, No. 7, Julio, 1985, pp.1832-1842.
Implementing condition-based maintenance using modeling and simulation: a case study of a permanent magnet synchronous motor
Jabid Quiroga Méndez1, Silvia Oviedo Castillo2
1 Mechanical Engineer, Universidad Industrial de Santander, Colombia. Master of Mechanical Engineering, Florida State University, USA. Associate Professor, Universidad Industrial de Santander. jabib@uis.edu.co
2 Electronic Engineering, Universidad Industrial de Santander. Candidate for Masters in Mechanical Engineering, Universidad Industrial de Santander, Colombia. siljuovi@uis.edu.co
ABSTRACT
This paper introduces condition-based maintenance (CBM) architecture regarding an electrical application. Appropriate and efficient fault detection constitutes one of the major challenges associated with CBM and a modelbased approach constitutes the way to achieve it. A case study using a permanent magnet synchronous motor (PMSM) is presented to illustrate implementing CBM using a neural network motor model. CBM may be implemented in real time using Matlab and dSpace. The difference between line currents' negative sequence components, predicted by a multilayer neural network, and the current values acquired from the motor is used as fault indicator. Experimental results have shown the efficiency of the proposed model in detecting several stator winding short faults in differing load conditions and fault severity, obtaining up to 95% reliability.
Keywords: condition-based maintenance, fault detection, neuronal networks, permanent magnet synchronous motor.
Received: January 20th 2010
Accepted: May 31th 2011
Introduction
Technological progress has encouraged system complexity. Highly-automated systems highlight the need for developing intelligent maintenance strategies that can optimise monitoring tasks' reliability.
Maintenance management aims to minimise operational costs, particularly reduced man-hours and repair costs. Various technologies have been pursued to achieve the above objectives, such as total productive maintenance (TPM), root cause analysis (RCA), preventative maintenance, etc.
Conventionally, maintenance has been implemented using corrective, reactive or preventative approaches. Maintenance is carried out in the reactive mode only after the obvious functional failure of a component or complete system breakdown. An alternative method is time-based maintenance where maintenance is based on accumulated operation hours. Time-based maintenance assumes that mean time between functional failures is statistically or experientially known when the equipment or machinery is running in normal usage. Obviously, time-based maintenance involves planned system shutdowns and scheduled repair activities on some still functioning equipment, meaning that system integrity may become compromised when corrective action is not necessary.
On the other hand, condition-based maintenance (CBM) avoids unnecessary stoppages. System condition is assessed in real time in a CBM approach. CBM methods are classified as being model -based, knowledge-based and signal-based. In this work redundant model-based maintenance is used instead of hardware redundancy (Kim and Parlos, 2002).The main benefit of a model -based approach lies in simplification of the information being assessed. This approach involves greater system diagnostic ability; however, this method has its own drawbacks. One of the most important ones concerns modelling error robustness (Liu, 2006). Therefore, modelling is a priority in CBM implementation. Embedded models in CBM usually correspond to a system model running in normal conditions.
This paper presents fundamental concepts and technical scope associated with CBM. It also shows the importance of CBM model-based modelling. An example of CBM for stator winding short fault detection is provided using a PMSM.
The conceptual structure for a CBM system
An effective maintenance system should be able to provide specific information about such system and its abnormal conditions. Maintenance tasks need to monitor system conditions through online monitoring and assure updated equipment information to accurately determine actual conditions for ascertaining a system’s actual overall condition and ultimately its required maintenance. A system captures and analyses machine signals to perform the previous task; these are compared to simulated information for such system in normal operation and predicts system's future condition based on trends associated with fault condition trends. The scope of a typical CBM model-based system is illustrated in Figure 1.

Real-time monitoring uses current performance data to produce fault indicators and continuously evaluate operating conditions. The predictive stage uses the information provided by real-time monitoring to predict a particular need for corrective action. CBM should contain the following parts (Figure 1):
- Sensor module to capture signals (vibration, current, temperature) in real-time;
- Data acquisition where measured signals are processed to produce fault features for fault detection and diagnosis purposes;
- Analytical model of the system to predict monitoring compared to measured values to produce residual basis for fault detection and diagnosis; and
- Fault detection module where residuals are compared to a statistically established threshold to determine a system’s condition.
Modelling and simulation
The key to the success of CBM is effective condition assessment based on an accurate analytical model (Figure 1)). Early detection of the fault condition allows maintenance personnel to schedule repairs prior to catastrophic failure or even human casualties. PMSM is investigated in this case study. PMSMs are a type of electric motor having increasing popularity because the armature ield is provided by permanent magnets mounted on rotor surface instead of the induced field. This characteristic provides the PMSM with high power density compared to induction motors (i.e. the most popular electromechanical torque applicator).
Methodology
PMSM faults
The number of PMSM applications is steadily increasing as a result of the advantages attributed to this type of motor. PMSM motors are found in both high- and low-power applications such as ship propulsion systems, robotics and machine tools. The main reason PMSM is so attractive is due to its efficiency and performance. PMSM presents several advantages when compared to induction motors, such as high power density, low weight, less copper loss and a small rotor for the same power output. These qualities are derived from the fact that the armature field is provided by permanent magnets mounted on rotor surface and the subsequent lack of armature windings and winding frame. The armature can thus provide higher flux density for similar air gaps, resulting in higher torque for less volume and current. PMSMs are referred to as "synchronous" because their rotor magnetic fields rotate at the same speed (synchronous speed) as their stator magnetic fields.
PMSMs are generally robust; they are frequently exposed to severe circumstances so that they are inclined to certain fault conditions after long periods of continuous operation. The statistics show that stator winding faults account for the largest percentage of electric motor failures (Ojo et al., 2002). The interturn fault in stator windings usually starts as an undetected insulation failure between adjacent turns and then develops into a shortcircuit isolating a number of turns. Single stator coil winding faults may have relatively little effect on motor performance but may affect overall motor reliability, availability and longevity (Awadallah and Morcos, 2004). Though starting with incipient turn-to-turn short-circuits, undetected small insulation failures can deteriorate and accumulate rapidly. The resulting high current may eventually lead to loss of phase winding, phase to phase or phase to ground faults.
Causes of stator winding faults can be summarised as follows (Bonnet and Soukup, 1992; Nandy et al., 2005):
- Interturn insulation suffers from transient overvoltage during motor start-up;
- Lack of balance and overvoltage cause increases in winding temperature and deterioration of the insulation;
- Loose bracing for end winding;
- Short-circuits and electrical discharges; and
- Aggressive environments weaken the insulation i.e. contamination, moisture, chemicals and high temperatures.
Fault model development
One of the most challenging tasks in modelling for CBM purposes is the development of robust and accurate fault models. The previous characteristics are intended to attenuate, or in the best cases, eliminate monitoring misdetections. The fault is explicit in line current asymmetry in the specific case of a stator winding short in a PMSM. A CBM-based model thus requires a healthy model simulating the currents of the system in normal conditions. The predicted currents are compared with actual current values producing residuals which form the basis of fault detection. A nonlinear empirical model using neural networks was developed for determining line currents using line voltages and motor speed because of the complexity of the dynamic behaviour associated with the PMSM in normal condition and load fluctuation and due to the difficulties associated with establishing exact mathematical PMSM models with conventional methods (Quiroga et al., 2009).The architecture for the problem being addressed was a neural network having a structure corresponding to a multi-layer dynamic recurrent NN with local and global feedback (as shown in Figure 2).

Local feedback was achieved in the proposed network by introducing feedback within the hidden layer, whereas global feedback was produced by connecting network output to network input.
The implemented NN consisted of an input layer, a hidden layer and an output layer. The tansig function was used in this study in the hidden layer and purelin was used in the output layer. Input vector was defined as U(t), consisting of the actual and past normalised values for the three phase line voltages (Vab, Vbc, Vca), the three normalised predicted phase currents and the rotor’s normalised rotational speed (see Figure 2)).
Figure 2) shows that the hidden layer was composed of six neurons having delayed local feedback used in each neuron. The output layer, with global feedback, had three nodes, corresponding to three-phase current predictions.
The Nguyen-Widrow method was used for initialisation (Nguyen and Widrow, 1990).Network performance during the training stage was evaluated in terms of MSE. The training function used updated weighting and bias by applying Bayesian regulation, in combination with the Levenberg-Marquardt optimisation approach. This combination minimised squared errors and weighting and then determined the correct combination so as to produce a well generalised network (Foresee and Hagan, 1997).
Residual generation
Residuals are the basis of the fault detection strategy and are produced by comparing three-phase current predictions and actual three-phase current values. Theoretically, residuals are small values during normal operation even under load fluctuation. However, residuals generated under a fault condition deviate from nominal value. The residual for phase A (phases B and C were similar) was expressed as:
 | [1] |
where  was the actual value of current in phase A at time t and
was the actual value of current in phase A at time t and  was the predicted value of current in phase A at time
t.
was the predicted value of current in phase A at time
t.
Figure 3 gives an overview of fault detection and diagnosis (FFD) implemented as a part of the CBM described. The proposed fault indicator was based on observation of the residuals’ negative sequence component magnitude. This indicator rising above some previously established baseline by observation of the motor in normal conditions would result from the presence of a fault condition. The system was able to locate and evaluate the severity of the fault monitored

Negative sequence component
The fault studied was reflected by an imbalance (asymmetry) in motor line currents. This condition produced an increase in negative sequence component magnitude. Both analytical and experimental results have demonstrated an increase in negative sequence current regarding stator winding short-circuits (Williamson and Mirzoian, 1985). Negative sequence current magnitude was determined by:
 | [2] |
where la,f , lb,f and lc,f were current signal fundamental component magnitude for three-phase currents and α was a phase rotation operator equivalent to ei 2π/3 or 120°.
Experiments showed that load fluctuation produced onstationary asymmetry which could generate a significant increase in high frequency component magnitude in negative sequence current. A false alarm could thus have resulted in the monitoring system(see Figure 4).
A robust fault detection scheme was obtained using a model which provided current prediction under normal and load fluca genetuations. The model may reproduce current behaviour under load fluctuations, so, theoretically, the residuals were small values during normal operation, even under load fluctuation. However, the residuals generated under a fault condition deviated from nominal value. The negative component of the residuals ra,2 (3) was thus used as a fault indicator to produce robust fault detection in the proposed CBM:
Experimental results
The proposed CBM was experimentally validated using a system consisting of an 11.25 kW, 640 V, 60 Hz, Y-connected 8-pole PMSM. A DC motor was mechanically coupled to the PMSM to serve as load (see Figure 4)). Load was changed during the experiments by varying DC motorarmature resistance to emulate load fluctuation.
The test bench was specifically designed to emulate different stator winding fault severity levels in this proposed experimental setup. The stator windings were reconstructed, as shown in Figure 5. Different severity levels were simulated by closing different pairs of taps, which could also be observed by monitoring the fault current generated in the short-circuit loop. Only two distintaps were placed in phase A, having6.25% and 12.5%shorted windings.

An adjustable resistor was used to emulate a less severe fault (incipient fault), as shown in Figure 5. Change in stator winding fault severity level were emulated by adjusting this resistor’s value, reflected in the variation of the loop current and the magnitude of current asymmetry, as shown in Table 1
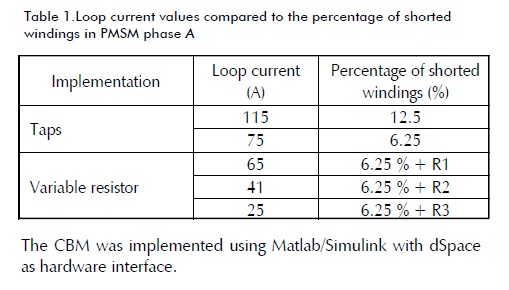
The CBM was implemented using Matlab/Simulink with dSpace as hardware interface.
A series of case studies were performed, attempting to cover a wide variety of operating conditions at different fault and load levels. However, due to space limitations, only two typical cases are presented here for each approach. The first case was performed to demonstrate incipient fault detectability (less than 6.25% of winding short in phase A) with 25 A loop current under 0%-30% fluctuating load conditions of rated torque. The fault was applied twice and the residuals' negative sequence component was obtained, as shown in Figure 6.

Figure6 shows that the system was effective in distinguishing between normal and fault conditions under load fluctuation. Residuals’ negative sequence component magnitude under fault conditions had slight changes in magnitude, mainly caused by deviations in current prediction in the neural network. Nevertheless, variations were not significant and the system performed satisfactorily in detecting the fault. A second case was performed under no-load load fluctuation of to 45% of rated torque at 41.5 A loop current in the fault. In this case the fault was applied three times (see Figure 7). An increase in residuals’ negative sequence component magnitude of was observed in the second case as a result of a more severe fault condition when comparing the experimental results obtained for the two cases studied.

The proposed indicator had a strong correlation between its magnitude and fault severity level in successive tests. This is illustrated in Table 2 and Figure 8 where it can be observed that residuals’ negative sequence current increased with loop current and fault severity.


The increase in negative ra,2 in Table2 was calculated using:
 | [8] |
Where x was the actual value and x0 was normal condition value.
Conclusions
The early detection of faults in electric machines is of great significance for industry. Early, reliable and accurate machine monitoring and fault detection schemes are the object of interest and research. The CBM provides early fault detection using indicators revealed in current signals' dynamic characteristics.
In this PMSM case study, the CBM method was implemented using the negative sequence current of the difference between current actual and predicted values as a fault indicator for stator winding short-circuit faults. An NN multilayer was used to produce the residuals. A successful model was implemented for detecting fault conditions under changing load condition. The experiments showed a strong correlation between fault indicator magnitude and fault severity level.
The stator winding short fault was only considered in this case study. However, many other types of faults should be considered, such as bearing faults, air gap eccentricity, shaft faults, etc. Faults should be considered to the maximum extent possible for a comprehensive fault detection system.
References
Awadallah, M.A., Morcos, M. M., ANFIS-based diagnosis and location of stator interturn faults in PM brushless DC motors., IEEE Trans. Energy Conversion, Vol. 19, No. 4, 2004, pp. 795–796.
Bonnett, A.H., Soukup, G.C., Cause and analysis of stator and rotor failures in three-phase squirrel-cage induction motors., IEEE Transactions on Industry Applications, Vol.28, No.4, Jul/Aug 1992, pp.921-937.
Foresee, F.D., Hagan, M.T., Gauss-Newton approximation to Bayesian regularization., Proceedings of the 1997 International Joint Conference on Neural Networks, 1997, pp. 1930–1935.
Kim, K., Parlos, A., G., Induction Motor Fault Diagnosis Based on Neuropredictors and Wavelet Signal Processing., IEEE/ASME Transactions on Mechatronics, Vol. 7, No 2, June 2002, pp 201-219.
Liu, L., Robust fault detection and diagnosis for permanent magnet synchronous motors., Ph.D. dissertation, Dept. Mech. Eng., Florida State University, Tallahassee, FL, 2006.
Nandi, S., Toliyat, H.A., Xiaodong, L., Condition monitoring and fault diagnosis of electrical motors-a review., IEEE Transaction on Energy Conversion, vol.20, no.4, pp. 719-729, Dec.2005
Nguyen, D., Widrow, B., Improving the learning speed of 2-layer neural networks by choosing initial values of the adaptive weights., Proceedings of the International Joint Conference on Neural Networks, Vol. 3, 1990, pp. 21–26.
Ojo, O., Osaloni O., Kshirsagar P., Models for the control and simulation of synchronous type machine drives under various fault conditions., in 2002 Conference Record Ind. Applicat, 2002.
Quiroga, J., Cartes, D., Edrington, C., Neural Network Based System Identification of a PMSM Under Load Fluctuation., Revista DYNA, vol 76, no. 160, pp. 273-283, Dec. 2009.
Williamson, S., Mirzoian, K., Analysis of cage induction motors with stator windings faults., IEEE Transactions Power App. Systems, Vol. 104, No. 7, Julio, 1985, pp.1832-1842.
References
Awadallah, M.A., Morcos, M. M., ANFIS-based diagnosis and location of stator interturn faults in PM brushless DC motors., IEEE Trans. Energy Conversion, Vol. 19, No. 4, 2004, pp. 795–796. DOI: https://doi.org/10.1109/TEC.2004.837273
Bonnett, A.H., Soukup, G.C., Cause and analysis of stator and rotor failures in three-phase squirrel-cage induction motors., IEEE Transactions on Industry Applications, Vol.28, No.4, Jul/Aug 1992, pp.921-937. DOI: https://doi.org/10.1109/28.148460
Foresee, F.D., Hagan, M.T., Gauss-Newton approximation to Bayesian regularization., Proceedings of the 1997 International Joint Conference on Neural Networks, 1997, pp. 1930–1935.
Kim, K., Parlos, A., G., Induction Motor Fault Diagnosis Based on Neuropredictors and Wavelet Signal Processing., IEEE/ASME Transactions on Mechatronics, Vol. 7, No 2, June 2002, pp 201-219. DOI: https://doi.org/10.1109/TMECH.2002.1011258
Liu, L., Robust fault detection and diagnosis for permanent magnet synchronous motors., Ph.D. dissertation, Dept. Mech. Eng., Florida State University, Tallahassee, FL, 2006.
Nandi, S., Toliyat, H.A., Xiaodong, L., Condition monitoring and fault diagnosis of electrical motors-a review., IEEE Transaction on Energy Conversion, vol.20, no.4, pp. 719-729, Dec.2005 DOI: https://doi.org/10.1109/TEC.2005.847955
Nguyen, D., Widrow, B., Improving the learning speed of 2-layer neural networks by choosing initial values of the adaptive weights., Proceedings of the International Joint Conference on Neural Networks, Vol. 3, 1990, pp. 21–26. DOI: https://doi.org/10.1109/IJCNN.1990.137819
Ojo, O., Osaloni O., Kshirsagar P., Models for the control and simulation of synchronous type machine drives under various fault conditions., in 2002 Conference Record Ind. Applicat, 2002.
Quiroga, J., Cortes, D., Edrington, C., Neural Network Based System Identification of a PMSM Under Load Fluctuation., Revista DYNA, vol 76, no. 160, pp. 273-283, Dec. 2009.
Williamson, S., Mirzoian, K., Analysis of cage induction motors with stator windings faults., IEEE Transactions Power App. Systems, Vol. 104, No. 7, Julio, 1985, pp.1832-1842. DOI: https://doi.org/10.1109/TPAS.1985.319221
How to Cite
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Download Citation
CrossRef Cited-by
1. Geovanny Jimenez Vargas, Ivan Endara Velez, P. Mendonça. (2024). Optimal maintenance management for synchronous generators: A condition-based approach to predict and assess equipment wear. E3S Web of Conferences, 546, p.02004. https://doi.org/10.1051/e3sconf/202454602004.
Dimensions
PlumX
Article abstract page views
Downloads




License
Copyright (c) 2011 Jabid Quiroga Méndez, Silvia Oviedo Castillo

This work is licensed under a Creative Commons Attribution 4.0 International License.
The authors or holders of the copyright for each article hereby confer exclusive, limited and free authorization on the Universidad Nacional de Colombia's journal Ingeniería e Investigación concerning the aforementioned article which, once it has been evaluated and approved, will be submitted for publication, in line with the following items:
1. The version which has been corrected according to the evaluators' suggestions will be remitted and it will be made clear whether the aforementioned article is an unedited document regarding which the rights to be authorized are held and total responsibility will be assumed by the authors for the content of the work being submitted to Ingeniería e Investigación, the Universidad Nacional de Colombia and third-parties;
2. The authorization conferred on the journal will come into force from the date on which it is included in the respective volume and issue of Ingeniería e Investigación in the Open Journal Systems and on the journal's main page (https://revistas.unal.edu.co/index.php/ingeinv), as well as in different databases and indices in which the publication is indexed;
3. The authors authorize the Universidad Nacional de Colombia's journal Ingeniería e Investigación to publish the document in whatever required format (printed, digital, electronic or whatsoever known or yet to be discovered form) and authorize Ingeniería e Investigación to include the work in any indices and/or search engines deemed necessary for promoting its diffusion;
4. The authors accept that such authorization is given free of charge and they, therefore, waive any right to receive remuneration from the publication, distribution, public communication and any use whatsoever referred to in the terms of this authorization.




















