


Published
A survey of repetitive control in varying frequency conditions
Revisión de control repetitivo digital en condiciones de frecuencia variable
DOI:
https://doi.org/10.15446/ing.investig.v31n2.23462Keywords:
repetitive control, varying frequency, high order repetitive control, varying sampling period. (en)control repetitivo, frecuencia variable, control repetitivo de alto orden, muestreo variable. (es)
Downloads
Digital repetitive control is a strategy that allows tracking/ rejecting periodic signals. Repetitive controllers are designed assuming that the exogenous signal period is constant and known, its main drawback being the dramatic loss of performance when signal frequency varies. This paper reviews the most relevant proposals advanced for overcoming this problem.
El control repetitivo digital es una técnica que permite el seguimiento y rechazo de señales periódicas. Los controladores repetitivos son diseñados asumiendo que las señales a seguir/rechazar tienen una frecuencia fija y conocida, siendo su principal desventaja la degradación de desempeño cuando esta frecuencia varía. Este artículo presenta una revisión de las diferentes estrategias utilizadas con el fin de solventar dicha problemática.
Revisión de control repetitivo digital en condiciones de frecuencia variable
A survey of repetitive control in varying frequency conditions
Germán Andrés Ramos Fuentes1, Josep Olm Miras2, Ramón Costa Castelló3
1 Magister en Automatización Industrial, Universidad Nacional de Colombia. Profesor asistente, Universidad Nacional de Colombia, Colombia. garamosf@unal.edu.co
2 Doctor en Ciencias (Físicas), Universitat Politécnica de Catalunya. Profesor ayudante doctor, Universitat Politécnica de Catalunya, España. josep.olm@upc.edu
3 Doctor en Informática, Universitat Politécnica de Catalunya. Profesor Titular, Universitat Politécnica de Catalunya, España. ramon.costa@upc.edu
RESUMEN
El control repetitivo digital es una técnica que permite el seguimiento y rechazo de señales periódicas. Los controladores repetitivos son diseñados asumiendo que las señales a seguir/rechazar tienen una frecuencia fija y conocida, siendo su principal desventaja la degradación de desempeño cuando esta frecuencia varía. Este artículo presenta una revisión de las diferentes estrategias utilizadas con el fin de solventar dicha problemática.
Palabras clave: control repetitivo, frecuencia variable, control repetitivo de alto orden, muestreo variable.
ABSTRACT
Digital repetitive control is a strategy that allows tracking/rejecting periodic signals. Repetitive controllers are designed assuming that the exogenous signal period is constant and known, its main drawback being the dramatic loss of performance when signal frequency varies. This paper reviews the most relevant proposals advanced for overcoming this problem.
Keywords: repetitive control, varying frequency, high order repetitive control, varying sampling period.
Recibido: mayo 03 de 2010
Aceptado: julio 01 de 2011
Introducción
El control repetitivo (RC) (Costa-Castelló et al., 2005; Tomizuka, 2008; Wang et al., 2009) es una técnica basada en el principio del modelo interno (IMP) (Francis y Wonham, 1976). éste establece que para seguir/rechazar una señal es necesario que su generador esté incluido en lazo de control. El RC utiliza el IMP para el seguimiento/rechazo de señales periódicas asumiendo que la frecuencia de las señales a seguir/rechazar es constante y conocida. Esto lleva a la selección de un número de muestras por período que es incorporado estructuralmente en el algoritmo de control.
Se ha mostrado que pequeños cambios en la frecuencia de la señal implican una pérdida importante del desempeño (Steinbuch, 2002).
Control repetitivo digital
La implementación digital del RC involucra la discretización de las señales externas. De este modo, una señal Tp -periódica muestreada con período Ts se convierte en una señal N -periódica (N= Tp / Ts ). El modelo interno de este tipo de señales es de la forma4 (Tomisuka et al., 1989):
 | [1] |
Otros tipos de modelos internos han sido propuestos dependiendo del tipo concreto de señal a tratar (Escobar et al., 2007; Griñó y Costa-Castelló, 2005).
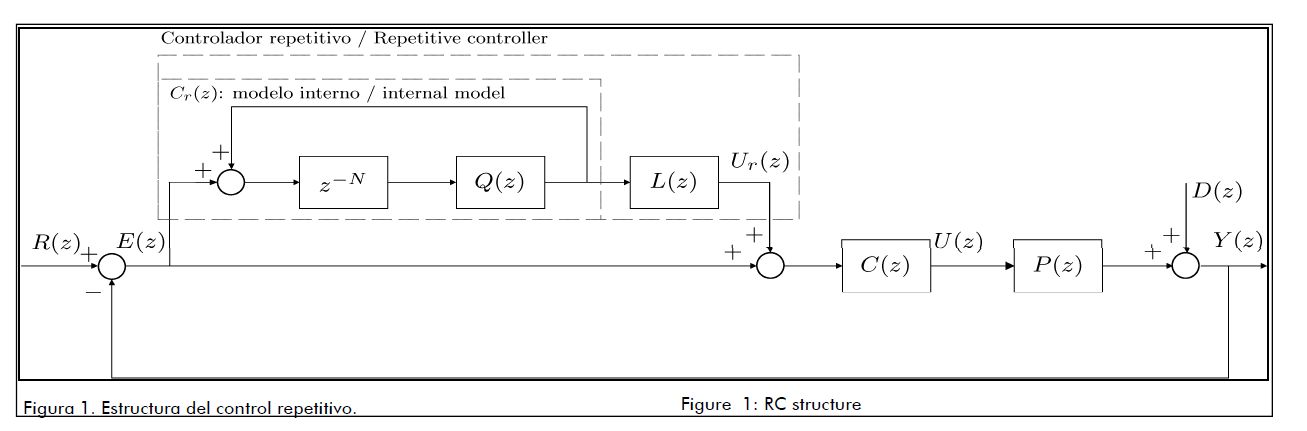
La principal característica de (1) es que tiene N polos uniformemente espaciados sobre el círculo unitario del plano complejo. De esta manera el controlador proporciona ganancia infinita en las frecuencias ω =2kπ/N , con k = 0, 1, 2, ...,N-1 . Esta elevada ganancia compromete la estabilidad y la robustez del sistema. Por ello se incluyen dos filtros más: L(z), usado para asegurar estabilidad, y Q(z), empleado para proveer robustez ante dinámicas no modeladas. Aunque existen diversas estructuras, la más usada es la mostrada en la figura 1. En ésta el controlador repetitivo es adicionado a un controlador subyacente C(z), el cual es diseñado para estabilizar la planta P(z). Así (1), queda de la forma:
 | [2] |
La estructura usada en RC fue inicialmente propuesta en tiempo continuo (Hara et al., 1988; Inoue et al., 1981), mientras que la primera implementación digital fue descrita en (Nakano y Hara, 1986)
Estabilidad
El análisis de la estabilidad del sistema de lazo cerrado (figura 1) no resulta trivial, por ello se sigue el análisis planteado en Inoue et al. (1981). La función de sensibilidad del sistema de lazo cerrado resulta:
 | [3] |
Con So(z) = 1/(1+C(z)P(z)), la función de sensibilidad y To(z) = C(z)P(z)/(1+C(z)P(z)) la función de sensibilidad complementaria del sistema sin RC, y siendo SM(z) la función de sensibilidad modificante, la cual muestra el efecto del RC en la función de sensibilidad del sistema:
 | [4] |
Con esto, el sistema de la figura 1 es estable si:
1. So(z) es estable, lo que proviene de la estabilidad del lazo subyacente,
2. (1 – z-NQ(z)) es estable, lo cual se cumple definiendo Q(z) como un filtro FIR,
3. ⁄Q(z)⁄< 1,
4. ⁄1 – To(z)L(z)⁄ <1
El diseño de L(z) se basa en la cancelación de la fase deTo(z) Inoue, 1990). En los sistemas de fase mínima resulta L(z) = kΥ To-1(z), con 0 < kΥ < 2 ; donde kΥ se selecciona mediante un compromiso entre robustez y desempeño (Hillerström y Lee, 1997).
Aplicaciones
El RC ha sido ampliamente usado en diferentes áreas como lectores de discos duros y discos compactos (Chew y Tomizuka, 1990), robótica (Kasac et al., 2008; Sun et al., 2007), electrohidráulica (Kim y Tsao, 2000), supresión de vibraciones (Daley et al., 2006; Hattori et al., 2000), intercambiadores de calor (álvarez et al., 2007), compensación de fricción (Huang et al., 1998), máquinas de inyección de moldes (Nan et al., 2006), actuadores piezoeléctricos (Choi et al., 2002), control de motores lineales (Chen y Hsieh, 2007), rectificadores electrónicos (Zhou y Wang, 2003), inversores PWM (Li et al., 2006; ang et al., 2007b) y filtros activos (Costa-Castelló et al., 2009), entre otras.
Desempeño
Desempeño en condiciones de frecuencia variable
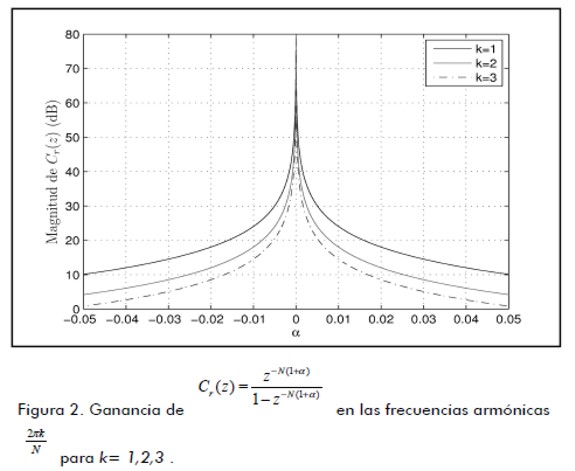
En la mayora de aplicaciones prácticas la frecuencia no es exactamente conocida o varía con el tiempo. La figura 2 muestra la ganancia del modelo interno en variaciones del período de la señal para los armónicos k=1, 2 y 3. Como puede verse, el desempeño decae drásticamente al alejarnos del período nominal, lo que es aún peor para armónicos superiores.
Desempeño en presencia de errores no armónicos
Debido al efecto cama de agua (Songchon y Longman, 2001), en los controladores repetitivos la función de sensibilidad presenta una amplificación de frecuencias ubicadas entre dos armónicos consecutivos. Este efecto degrada el comportamiento del sistema y debe ser tenido en cuenta.
Organización de las propuestas
Se han hecho varias propuestas para solucionar el problema de desempeño al trabajar con señales de frecuencia variable. éstas se pueden agrupar en dos líneas principales. En primer lugar tenemos el control repetitivo de alto orden (HORC), el cual usa varios bloques de retardo para mejorar la robustez. En segundo lugar está el control repetitivo adaptativo, donde uno o más elementos del controlador son ajustados en línea para mantener el desempeño. Los elementos ajustados son, o bien el período muestreo (Ts) o bien el número de muestras por período (N).
Control repetitivo de alto orden
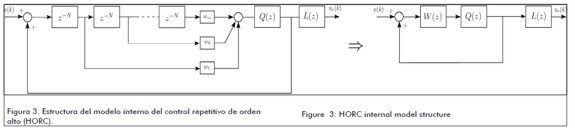
La arquitectura del modelo interno utilizado en el controlador repetitivo de alto orden (HORC) se muestra en la figura 3 y su función de transferencia es:
 | [5] |
donde 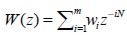 , y usualmente
, y usualmente  . La función de sensibilidad modificante con el HORC toma la forma:
. La función de sensibilidad modificante con el HORC toma la forma:
 | [6] |
Las condiciones de estabilidad son las ya planteadas, sustituyendo la condición iii) por |W(z)Q(z) |< 1.
Métodos de selección de los pesos
Dada la relación excluyente entre la robustez a la variación de la frecuencia y la sensibilidad a las frecuencias no armónicas, la selección de los pesos wi se plantea basada en la solución de un problema de optimización.
En Inoue (1990) el HORC es usado para mejorar el comportamiento entre frecuencias armónicas. La función de costo a minimizar es el valor medio del cuadrado de SMW(z),  , lo cual implica que todos los pesos deben ser iguales y de valor wi=1/m.
, lo cual implica que todos los pesos deben ser iguales y de valor wi=1/m.
En Chang et al. (1995) el objetivo es reducir el espectro del error considerando los componentes armónicos y no armónicos, es decir  .
.
En Steinbuch (2002) se pretende reducir la sensibilidad frente a variaciones en el período de la señal. Para ello se hacen cero las m primeras derivadas de W(z) respecto del período de la señal. Ello permite mantener la ganancia de (5) elevada en un intervalo de frecuencias alrededor de las frecuencias armónicas. Este problema presenta solución analítica.
En Steinbuch et al. (2007) se generalizan los resultados de Chang et al. (1995) mediante la resolución de  , siendo
, siendo  una función de peso que determina el intervalo en el que la norma de SMW (ω) será minimizada. Los resultados de Chang et al. (1995) y Steinbuch (2002) corresponden a casos particulares de esta formulación.
una función de peso que determina el intervalo en el que la norma de SMW (ω) será minimizada. Los resultados de Chang et al. (1995) y Steinbuch (2002) corresponden a casos particulares de esta formulación.
En Pipeleers et al. (2008), a diferencia de las anteriores, se elimina la restricción  . Ello reduce la ganancia en las frecuencias armónicas, lo cual permite obtener mejores resultados en el desempeño para las frecuencias no armónicas. Los resultados de Steinbuch (2002); Steinbuch et al. (2007) y Chang et al. (1995) corresponden a casos particulares de esta formulación.
. Ello reduce la ganancia en las frecuencias armónicas, lo cual permite obtener mejores resultados en el desempeño para las frecuencias no armónicas. Los resultados de Steinbuch (2002); Steinbuch et al. (2007) y Chang et al. (1995) corresponden a casos particulares de esta formulación.
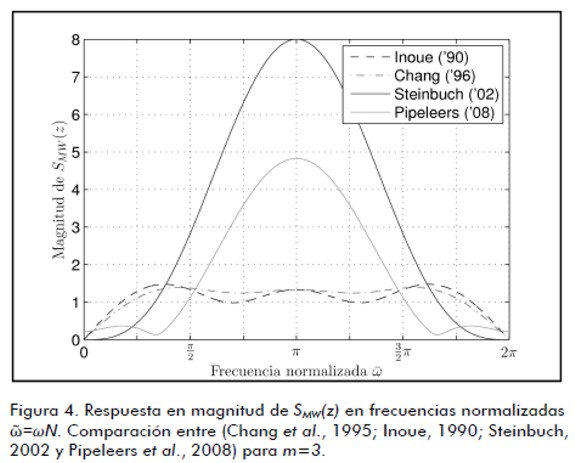
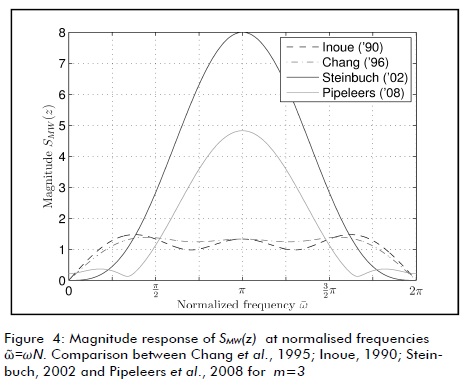
La figura 4 muestra la comparación de los resultados de las diferentes propuestas para m=3 . El diseño en Pipeleers et al. (2008), con una incertidumbre del 20% en el período, presenta mejores resultados que el de Steinbuch (2002), tanto para desempeño robusto como no armónico. Se puede notar que la ganancia en las frecuencias armónicas no es cero y que ella es menor para un intervalo más amplio de frecuencias alrededor de los armónicos. Adicionalmente se puede observar que, a pesar de mejorar el comportamiento entre armónicos, las propuestas de Chang et al. (1995) e Inoue (1990) no representan un diseño robusto ante cambios en el período. Los pesos obtenidos en las propuestas mencionadas se resumen en la tabla 1.

Control repetitivo adaptativo
Adaptación del retardo
En esta estrategia el parámetro ajustable es el retardo N. Existen dos esquemas: adaptación entera y adaptación fraccionaria.
Retardo entero. En condiciones de frecuencia variable, esto es, Tp variable, la relación η = Tp/Ts tomará un valor que puede no ser un número entero, por lo tanto la estrategia de adaptación consiste en aproximar N al entero más cercano a η (Dotsch et al., 1995; Manayathara et al., 1996); una demostración de estabilidad para sistemas con N variable se realiza en Hu (1992).
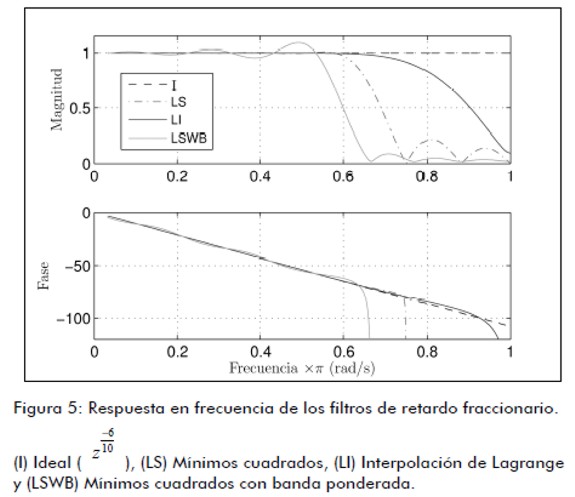
Retardo fraccionario. En esta propuesta la parte entera de η mantiene su implementación original  , mientras que la parte fraccionaria se implementa usando un filtro FIR que la aproxima (Laakso et al., 1996). Para obtener los parámetros del filtro FIR se usa un proceso de optimización en línea que tiene como función de costo el error en la frecuencia (Wang et al., 2007a; Yu y Hu, 2001). La figura 5 muestra una comparación de los resultados obtenidos mediante tres técnicas diferentes.
, mientras que la parte fraccionaria se implementa usando un filtro FIR que la aproxima (Laakso et al., 1996). Para obtener los parámetros del filtro FIR se usa un proceso de optimización en línea que tiene como función de costo el error en la frecuencia (Wang et al., 2007a; Yu y Hu, 2001). La figura 5 muestra una comparación de los resultados obtenidos mediante tres técnicas diferentes.
Período de muestreo variable
Esta sección agrupa las estrategias donde se varía el período de muestreo, Ts , con el fin de mantener la relación N=Tp/Ts,/ constante.
En Hillerström (1994) un controlador repetitivo es aplicado a una bomba peristáltica donde las perturbaciones están directamente relacionadas con la posición angular del mecanismo. Las variaciones del período de muestreo hacen que el comportamiento de la planta no corresponda al de un sistema lineal invariante en el tiempo (LTI). Por lo tanto, los parámetros del controlador son función del período de muestreo.
En Ramos et al. (2009) para analizar los efectos de esta estrategia sobre la estabilidad del sistema se realiza un análisis basado en un mallado de desigualdades lineales matriciales (LMI) (Apkarian y Adams, 1998; Sala, 2005).
El trabajo presentado en (Olm et al., 2011), a diferencia del anterior, presenta una metodologa para analizar la estabilidad del sistema basada en análisis robusto, (Fujioka, 2008; Suh, 2008). Los componentes variantes en el tiempo son tratados como incertidumbres de norma acotada. Los resultados llevan a una reducción del conservatismo y se obtienen intervalos de estabilidad más amplios comparados con el caso anterior.
En Olm et al. (2010) se presenta una estrategia de diseño para compensar los cambios paramétricos ocasionados por la variación del período de muestreo. Esto se logra mediante la inclusión de un precompensador que cancela los efectos del muestreo variable para el sistema de lazo cerrado y hace el lazo cerrado invariante frente a los cambios en el período de muestreo.
Adaptación entera del retardo con período de muestreo variable
En Tsao et al. (2000) se obtiene N mediante una aproximación entera del cociente Tp/Ts , como se describió, y adicionalmente se reajusta Ts para que el período externo Tp resulte en un múitiplo entero N de Ts . Aunque se muestran resultados experimentales, el trabajo no realiza un análisis formal de estabilidad.
Interpoladores
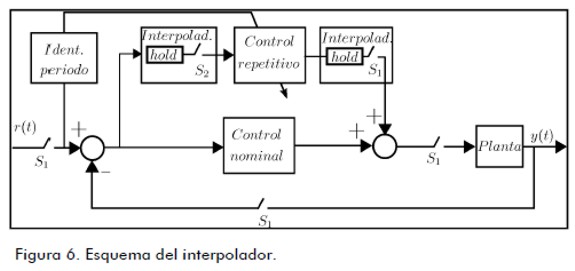
En Cao y Ledwich (2002) se propone un sistema con dos períodos de muestreo independientes, basado en un lazo con período de muestreo nominal constante conformado por la planta y un controlador estabilizante y el controlador repetitivo que funciona a período variable usando la misma técnica de adaptación de Tsao et al. (2000). La unión de estas dos partes se realiza por medio de un esquema con dos interpoladores, localizados en la entrada y salida del lazo de control repetitivo. Cada interpolador se encarga de reconstruir la señal a partir de las muestras de entrada y entregarla en el formato de muestras de salida correspondiente para que finalmente las dos acciones de control puedan ser sumadas. Este esquema se muestra en la figura 6.
Control repetitivo espacial
La propuesta en Chen y Yang (2007) describe un controlador repetitivo para un sistema rotacional en el que las perturbaciones dependen directamente de la posición angular. En lugar de usar un muestreo no uniforme, Hillerström (1994) propone usar una transformación de espacio que transforma el sistema en uno no lineal invariante en la posición (NPI). Posteriormente se linealiza mediante realimentación adaptativa y se introduce un controlador repetitivo estándar. En Yang y Chen (2008) se elimina la necesidad de medir el estado con un observador no lineal.
Conclusiones
En este artículo se han descrito diferentes técnicas propuestas para afrontar el problema de pérdida del desempeño de los controladores repetitivos digitales cuando éstos trabajan en condiciones de frecuencia variable. El HORC implica una mayor carga computacional y de memoria, aunque el cambio del período de muestreo involucra a su vez una complejidad tecnológica mayor.
Además en el HORC únicamente se pueden soportar cambios ligeros en el período de la señal. En los esquemas de adaptación es necesario realizar una estimación en línea de la frecuencia de la señal, mientras que en el HORC dicho estimador no es necesario. Finalmente, el HORC permite efectuar un análisis en el marco LTI, mientras que la variación del período de muestreo implica un marco de sistemas lineales variantes en el tiempo (LTV), lo que lleva a una mayor complejidad teórica a la hora de probar estabilidad.
Agradecimientos
Este trabajo ha sido financiado parcialmente por el MEC, con el proyecto DPI2010-15110.
NOTAS AL PIE
4 Este modelo interno se obtiene a partir de la transformada Z de la representación en series de Fourier discreta de la señal periódica.
Referencias
Álvarez, J.D., Yebra, L.J., Berenguel, M., Repetitive control of tubular heat exchangers. Journal of Process Control, Vol. 17, 2007, pp. 689-701.
Apkarian, P., Adams, R.J., Advanced gain-scheduling techniques for uncertain systems. IEEE Trans Control Syst Tech, Vol. 6, 1998, pp. 21-32.
Cao, Z., Ledwich, G.F., Adaptive Repetitive Control to Track Variable Periodic Signals With Fixed Sampling Rate. IEEE/ ASME Trans on Mechatronics, Vol. 7, 2002, pp. 374-384.
Costa-Castelló, R., Griñó, R., Cardoner, R., Fossas, E., High-Performance Control of a Single-Phase Shunt Active Filter. IEEE Trans on Control Systems Technology, Vol. 17, 2009, pp. 1318-1329.
Costa-Castelló, R., Nebot, J., Griñó, R., Demonstration of the Internal Model Principle by Digital Repetitive Control of an Educational Laboratory Plant. IEEE Trans Education, Vol. 48, 2005, pp. 73-80.
Chang, W.S., Suh, I.H., Kim, T.W., Analysis and Design of Two Types of Digital Repetitive Control Systems., Automatica, Vol. 31, 1995, pp. 741-746.
Chen, C.-L., Yang, Y.-H., Adaptive Repetitive Control for Uncertain Variable-Speed Rotational Motion Systems Subject to Spatially Periodic Disturbances., American Control Conference, 2007 ACC ´07, 2007, pp. 564-569.
Chen, S.-L., Hsieh, T.-H., Repetitive control design and implementation for linear motor machine tool., Int Journal of Machine Tools and Manufacture, Vol. 47, 2007, pp. 1807- 1816.
Chew, K.K., Tomizuka, M., Digital control of repetitive errors in disk drive systems., IEEE Control Systems Magazine, Vol. 10, 1990, pp. 16-20.
Choi, G.S., Lim, Y.A., Choi, G.H., Tracking position control of piezoelectric actuators for periodic reference inputs., Mechatronics, Vol. 12, 2002, pp. 669-684.
Daley, S., Hätönen, J., Owens, D.H., Active vibration isolation in a mount using a repetitive control approach., Control Engineering Practice, Vol. 14, 2006, pp. 991-997.
Dotsch, H.G.M., Smakman, H.T., den Hof, P.M.J., Steinbuch, M., Adaptive repetitive control of a compact disc mechanism., Proc of IEEE Conf on Decision and Control, Vol. 2, 1995, pp. 1720-1725.
Escobar, G., Hernandez-Briones, P.G., Torres-Olguin, R.E., Valdez, A.A., A repetitive-based controller for the compensation of 6l\pm 1 harmonic components., Proc of the IEEE International Symposium on Industrial Electronics, 2007, pp. 3397- 3402.
Francis, B.A., Wonham, W.M., Internal Model Principle in Control Theory., Automatica, Vol. 12, 1976, pp. 457-465.
Fujioka, H., Stability analysis for a class of networked/embedded control systems: A discrete-time approach., American Control Conference, 2008, pp. 4997-5002.
Griñó, R., Costa-Castelló, R., Digital Repetitive Plug-in Controller for Odd-Harmonic Periodic References and Disturbances., Automatica, Vol. 41, 2005, pp. 153-157.
Hara, S., Yamamoto, Y., Omata, T., Nakano, M., Repetitive control system: a new type servo system for periodic exogenous signals., IEEE Trans on Automatic Control, Vol. 33, 1988, pp. 659-668.
Hattori, S., Ishida, M., Hori, T., Suppression control method for torque vibration of brushless DC motor utilizing repetitive control with Fourier transform., Proceedings of the 6th International Workshop on Advanced Motion Control, 2000, pp. 427-432.
Hillerström, G., On Repetitive Control., 1994.
Hillerström, G., Lee, R.C.H., Trade-offs in Repetitive Control., 1997.
Hu, J.-S., Variable Structure Digital Repetitive Controller., American Control Conference, 1992, pp. 2686-2690.
Huang, W., Cai, L., Tang, X., Adaptive repetitive output feedback control for friction and backlash compensation of a positioning table., Decision and Control, 1998 Proceedings of the 37th IEEE Conference on, 1998. pp. 1250-1251.
Inoue, T., Practical Repetitive Control System Design., Proceedings of the 29 IEEE Conference on Decision and Control, 1990, pp. 1673-1678.
Inoue, T., Nakano, M., Kubo, T., Matsumoto, S., Baba, H., High Accuracy Control of a Proton Synchroton Magnet Power Supply., Proc of the 8th IFAC World Congress, 1981, pp. 216-220.
Kasac, J., Novakovic, B., Majetic, D., Brezak, D., Passive Finite- Dimensional Repetitive Control of Robot Manipulators., IEEE Trans on Control Systems Technology, Vol. 16, 2008, pp. 570-576.
Kim, D.H., Tsao, T.-C., Robust Performance Control of Electrohydraulic Actuators for Electronic Cam Motion Generation., IEEE Trans On Control Systems Technology, Vol. 8, 2000, pp. 220-227.
Laakso, T.I., Valimaki, V., Karjalainen, M., Laine, U.K., Splitting the unit delay [FIR/all pass filters design]., Signal Processing Magazine, IEEE, Vol. 13, 1996, pp. 30-60.
Li, M., He, Z., Xing, Y., Analysis and Design of Repetitive controlled Inverter System with High Dynamic Performance., Power Electronics and Motion Control Conference, IPEMC 2006 CES/IEEE 5th International, 2006. pp. 1-5.
Manayathara, T.J., Tsao, T.-C., Bentsman, J., Rejection of unknown periodic load disturbances in continuous steelcasting process using learning repetitive control approach., IEEE Trans on Control Systems Technology, Vol. 4, 1996, pp. 259 -265.
Nakano, M., Hara, S., Microprocessor-based repetitive control. Microprocessor-Based Control Systems, 1986, pp. 279-296.
Nan, Y., Yu, L., Chen, Z., Wu, A., Study on Repetitive Controller for the Position Servo System of Electrical Injection Molding Machine., Intelligent Control and Automation, 2006 WCICA 2006 The Sixth World Congress on, 2006, pp. 8246-8250.
Olm, J.M., Ramos, G.A., Costa-Castello, R., Stability analysis of digital repetitive control systems under time-varying sampling period., Control Theory Applications, IET, Vol. 5, 2011, pp. 29-37.
Olm, J.M., Ramos, G.A., Costa-Castelló, R., Adaptive compensation strategy for the tracking/rejection of signals with timevarying frequency in digital repetitive control systems., Journal of Process Control, Vol. 20, 2010, pp. 551-558.
Pipeleers, G., Demeulenaere, B., Sewers, S., Robust High Order Repetitive Control: Optimal Performance Trade Offs., Automatica, Vol. 44, 2008, pp. 2628-2634.
Ramos, G.A., Olm, J.M., Costa-Castello, R., Digital repetitive control under time-varying sampling period: An LMI stability analysis., Control Applications, (CCA) Intelligent Control,(ISIC), IEEE, 2009, pp. 782-787.
Sala, A., Computer control under time-varying sampling period: An LMI gridding approach., Automatica, Vol. 41, 2005, pp. 2077-2082.
Songchon, T., Longman, R.W., On the waterbed effect in repetitive control using zero-phase filtering., Proc of the AAS/AIAA Space Flight Mechanics Meeting, 2001, pp. 1321-1340.
Steinbuch, M., Repetitive Control for Systems with Uncertain Period- Time., Automatica, Vol. 38, 2002, pp. 2103-2109.
Steinbuch, M., Weiland, S., Singh, T., Design of Noise and Period-Time Robust High Order Repetitive Control, with application to optical storage. Automatica, Vol. 43, 2007, pp. 2086-2095.
Suh, Y.S., Stability and stabilization of nonuniform sampling systems. Automatica, Vol. 44, 2008, pp. 3222-3226.
Sun, M.-X., He, X.-X., Chen, B.-Y., Repetitive Learning Control for Time-varying Robotic Systems: A Hybrid Learning Scheme., Acta Automatica Sinica, Vol. 33, 2007, pp. 1189-1195.
Tomisuka, M., Tsao, T.-C., Chew, K.-k., Analysis and Synthesis of Discrete-Time Repetitive Controllers., Journal of Dynamic Systems, Measurement and Control, Vol. 111, 1989, pp. 353-358.
Tomizuka, M., Dealing with periodic disturbances in controls of mechanical systems., Annual Reviews in Control, Vol. 32, 2008, pp. 193-199.
Tsao, T.-C., Qian, Y.-X., Nemani, M., Repetitive Control for Asymptotic Tracking of Periodic Signals With an Unknown Period., Journal of Dynamic Systems, Measurement, and Control, Vol. 122, 2000, pp. 364-369.
Wang, Y., Gao, F., III, F.J.D., Survey on iterative learning control, repetitive control, and run-to-run control., Journal of Process Control, Vol. 19, 2009, pp. 1589-1600.
Wang, Y., Wang, D., Zhang, B., Zhou, K., Fractional Delay Based Repetitive Control with Application to PWM DC/AC Converters., Control Applications, 2007 CCA 2007 IEEE International Conference on, 2007a, pp. 928-933.
Wang, Y., Wang, D., Zhou, K., Zhang, B., Ye, Y., Modelling and Robust Repetitive Control of PWM DC/AC Converters., IEEE Int Sym on Intelligent Control, 2007b, pp. 214-219.
Yang, Y.-H., Chen, C.-L., Spatially periodic disturbance rejection using spatial-based output feedback adaptive backstepping repetitive control., American Control Conference, 2008, pp. 4117-4122.
Yu, S.-H., Hu, J.-S., Asymptotic Rejection of Periodic Disturbances With Fixed or Varying Period., Journal of Dynamic Systems, Measurement, and Control, Vol. 123, 2001, pp. 324-329.
Zhou, K., Wang, D., Digital Repetitive Controlled Three-Phase PWM Rectifier., IEEE Transactions On Power Electronics, Vol. 18, 2003, pp. 309-316.
A survey of repetitive control in varying frequency conditions
Germán Andrés Ramos Fuentes1, Josep Olm Miras2, Ramón Costa Castelló3
1 Master in Industrial Automation, Universidad Nacional de Colombia. Assistant Professor, Universidad Nacional de Colombia, Colombia. garamosf@unal.edu.co
2Ph.D. of Science (Physics), Universitat Politécnica de Catalunya. Dr. Assistant Professor, Universitat Politecnica de Catalunya, Spain. josep.olm@upc.edu
3 Ph.D. in Computer Science, Universitat Politecnica de Catalunya. Professor, Universitat Politecnica de Catalunya, Spain. ramon.costa@upc.edu
ABSTRACT
Digital repetitive control is a strategy that allows tracking/ rejecting periodic signals. Repetitive controllers are designed assuming that the exogenous signal period is constant and known, its main drawback being the dramatic loss of performance when signal frequency varies. This paper reviews the most relevant proposals advanced for overcoming this problem.
Keywords: repetitive control, varying frequency, high order repetitive control, varying sampling period.
Received: May 3th 2010
Accepted: July 1th 2011
Introduction
Repetitive control (RC) (Costa-Castelló et al., 2005; Tomizuka, 2008; Wang et al., 2009) is an internal model principle (IMP)- based technique (Francis and Wonham, 1976). The IMP establishes that in order to track/reject a certain signal the generator of such signal has to be included in the control loop. RC uses the IMP for tracking/rejecting periodic signals, assuming that these signals’ frequency remains constant and known. This yields the selection of a number of samples per period which are structurally incorporated into the control algorithm.
However, it has been shown that even slight changes in signal frequency yield dramatic performance decay (Steinbuch, 2002). This paper reviews the most relevant proposals for overcoming this problem.
Digital repetitive control
Digital implementation of RC implies external signal discretisation. Hence, a continuous Tp-periodic signal sampled with period Ts becomes a discrete N -periodic signal (N= Tp / Ts). The internal model of these types of signals came from Tomisuka (Tomisuka et al., 1989)4:
 | [1] |
Other types of internal models have been proposed depending on the specific type of signal to be dealt with (Escobar et al., 2007; Griñó and Costa-Castelló, 2005).
The main feature of (1) is that it has N poles uniformly distributed on the complex plane' s unit circle. Hence, the controller provides infinite gain at ω =2kπ/N frequencies, with k = 0, 1, 2, …,N-1. This high gain compromises system stability and robustness. Two additional filters are included to address this fact: Lz), used to assure stability and Q(z) aiming at providing robustness regarding unmodelled dynamics. Although ther are several structures, the most usual one is that shown in Figure 1. Here the RC is added to a controller, C(z) , specifically designed to stabilise the plant P(z). Therefore (1) becomes:
 | [2] |

The RC structure was originally proposed in continuous time (Hara et al., 1988; Inoue et al., 1981) while the first digital implementation was reported in Nakano and Hara (1986).
Stability
Stability analysis of a closed-loop system (Figure 1) is important and this is why one follows the scheme proposed in Inoue (Inoue et al., 1981). The closed-loop system sensitivity function is:
 | [3] |
With So(z) = 1/(1+C(z)P(z)) and To(z) = C(z)P(z)/(1+C(z)P(z)) being, respectively, the system' s sensitivity function and complementary sensitivity function without RC, and SM(z) being the modifying sensitivity function, which shows the effect of the RC on s y s tem sensitivity:
 | [4] |
Hence, the system shown in Figure 1 would be stable if:
1. So(z) is stable, which arises from inner loop stability;
2. (1 z-NQ(z)) is stable, which may be fulfilled by defining Q(z) as a FIR filter;
3. ⁄Q(z)⁄< 1 ; and
4. ⁄1 To(z)L(z)⁄ <1
The design of L(z) is based on phase cancellation of To(z) (Inoue, 1990). For minimum phase systems, one takes L(z) = kΥ To-1(z), where 0 < kΥ < 2 ; and kΥ' are selected through trade-off between robustness and performance (Hillerström and Lee, 1997).
Applications
RC has been widely used in different areas, such as hard disk and CD drives (Chew and Tomizuka, 1990), robotics (Kasac et al., 2008; Sun et al., 2007), electro-hydraulic actuators (Kim and Tsao, 2000), vibration suppression (Daley et al., 2006; Hattori et al.,000), heat exchangers (álvarez et al., 2007), friction compensation (Huang et al., 1998), electrical injection molding machines (Nan et al., 2006), piezoelectric actuators (Choi et al., 2002), linear motor machine control (Chen and Hsieh, 2007), electronic rectifiers (Zhou and Wang, 2003), PWM inverters (Li et al., 2006; Wang et al., 2007b) and active filters (Costa-Castelló et al., 2009).
Performance
Performance in varying frequency conditions
Frequency is not exactly known or varies in most practical applications. Figure 2 shows internal model gain for signal period variations at harmonics k=1, 2 and 3. It can be noticed that performance decays dramatically the further away it is from the nominal period, and the situation becomes even worse for higher harmonics.

Performance faced with non-harmonic errors
Due to the waterbed effect (Songchon and Longman, 2001), RC controller sensitivity function shows amplification of frequencies between consecutive harmonics. This degrades system behavior and must be taken into account.
Organisation of the approaches
Several approaches have been proposed for resolving the performance issue when working with time-varying frequency signals. They can be grouped into two main sets: high order repetitive control (HORC) which uses several delay blocks to improve robustness and adaptive RC in which one or more controller parameters are adjusted on-line so as to maintain performance. The adjusted parameters are either sampling period (Ts) or the number of samples per period (N).
High order repetitive control
The internal model architecture used in HORC is shown in Figure 3, its transfer function being:

 | [5] |
where  , and usually
, and usually  . The modifying sensitivity function with HORC is:
. The modifying sensitivity function with HORC is:
 | [6] |
The stability conditions are coincident with already established ones, just replacing condition iii) by |W(z)Q(z) |< 1.
Weighting selection methods
Because of the excluding relationship between robustness regarding frequency variation and sensitivity to non-harmonic frequencies, selecting weighting wi is posed as an optimisation problem.
HORC is used in Inoue (Inoue, 1990) to improve harmonic frequency behaviour. The cost function to be minimised is the mean value of the square of SMW(z),  , which implies that all weighting must be equal and have a wi=1/m value.
, which implies that all weighting must be equal and have a wi=1/m value.
The goal in Chang (Chang et al., 1995) was to reduce the error spectrum, considering both harmonic and non-harmonic components,i.e.  .
.
Steinbuch (Steinbuch, 2002) aimed at reducing sensitivity to signal period variations. The first m derivatives of W(z) regarding signal period were zeroed. This allowed keeping a high gain for (5) in a wider neighbourhood around the harmonic frequencies. This problem exhibits an analytic solution.
Chang’s results (Chang et al., 1995) have been generalised in
Steinbuch (Steinbuch et al., 2007) through the solution of 
 being a weighting function establishing the interval in which the norm of SMW (ω) is to be minimised. Steinbuch (Steinbuch, 2002) and Chang' s (Chang et al., 1995) results corresponded to specific cases of this formulation.
being a weighting function establishing the interval in which the norm of SMW (ω) is to be minimised. Steinbuch (Steinbuch, 2002) and Chang' s (Chang et al., 1995) results corresponded to specific cases of this formulation.
Differently from the preceding approaches, the  constraint was removed in Pipeleers (Pipeleers et al., 2008). This reduces harmonic frequencies gains which leads to obtaining better performance results for non-harmonic frequencies. Steinbuch (Steinbuch, 2002; Steinbuch et al., 2007) and Chang’s (Chang et al., 1995) results corresponded to specific cases regarding this formulation.
constraint was removed in Pipeleers (Pipeleers et al., 2008). This reduces harmonic frequencies gains which leads to obtaining better performance results for non-harmonic frequencies. Steinbuch (Steinbuch, 2002; Steinbuch et al., 2007) and Chang’s (Chang et al., 1995) results corresponded to specific cases regarding this formulation.
Figure 4 gives a comparison of the above proposals for m=3. Pipeleers' design (Pipeleers et al., 2008) for 20% uncertainty during the period had better results than Steinbuch (Steinbuch, 2002) for robust and non-harmonic performance. Notice that the gain at harmonic frequencies was not zero and it was lower for a wider frequency interval around the harmonics too. It may also be observed that, besides improving inter-harmonic behaviour, the approaches in Inoue (Inoue, 1990) and Chang (Chang et al., 1995) did not exhibit a robust design regarding period changes. The weights obtained with the aforementioned approaches are summarised in Table 1.

Adaptive repetitive control
Delay adaptation
The adjusted parameter is delay N in this strategy. There are two approaches: integer adaptation and fractional adaptation.
Integer delay. In varying frequency conditions (i.e. with variable Tp), the η = Tp/Ts ratio may take a non-integer value. Hence, the adaptation strategy consists of approximating N to the nearest integer to η, (Dotsch et al., 1995; Manayathara et al., 1996); a stability proof for systems with varying N is available in Hu (Hu, 1992).
Fractional delay. In this proposal, the integer part of η· keeps its original implementation  , while the fractional part is implemented using an FIR filter to approximate it (Laakso et al., 1996). FIR filter parameters are obtained through on-line optimisation using frequency error as a cost function (Wang et al., 2007a; Yu and Hu, 2001). Figure 5 plots a comparison of the results obtained with three different techniques.
, while the fractional part is implemented using an FIR filter to approximate it (Laakso et al., 1996). FIR filter parameters are obtained through on-line optimisation using frequency error as a cost function (Wang et al., 2007a; Yu and Hu, 2001). Figure 5 plots a comparison of the results obtained with three different techniques.

Varying sampling period
This section includes approaches where sampling period, Ts, is varied, aiming to keep the N=Tp/Ts,/ ratio constant.
An RC is applied to a peristaltic bomb in Hillerström (Hillerström, 1994) where disturbances are directly related to a mechanism' s angular position. Sampling period variations imply that system behaviour is not that of a linear time invariant (LTI) system; controller parameters therefore depend on sampling period.
This strategy’s effect on system stability is analysed in Ramos (Ramos et al., 2009) via a linear matrix inequality (LMI)-gridding approach (Apkarian and Adams, 1998; Sala, 2005).
Differently from the preceding one, Olm (Olm et al., 2011) presents a methodology for stability analysis based on robust control theory (Fujioka, 2008; Suh, 2008). Time varying components are treated as norm-bounded uncertainties. The obtained results yield conservatism reduction and wider stability intervals, compared to Ramos (Ramos et al., 2009).
A methodology for compensating for parametric changes due to sampling period variations has been presented by Olm (Olm et al., 2010). This is achieved by including a pre-compensator that cancels out the effect of the time-varying sampling and makes the closed-loop system invariant to sampling period changes.
Integer adaptation of delay with variable sampling period
N is obtained in Tsao (Tsao et al., 2000) via an integer approximation of the Tp/Ts ratio, as previously described, and Ts is readjusted so that external period Tp results in an integer multiple N of Ts . Although experimental results are provided, the study does not include a formal stability analysis.
Interpolators
Cao and Ledwich' s proposal (Cao and Ledwich, 2002) includes a system having two independent sampling periods; one is based on a loop with nominal sampling which is constant and includes the plant and a stabilising controller, while RC works with variable period using Tsao' s adaptation technique (Tsao et al., 2000). These parts are assembled with two interpolators which are located at RC control loop input and output. Each interpolator is in charge of reconstructing the signal from input samples and delivering it in the format of the corresponding output samples so that the two control actions can be added up. This structure is shown in Figure 6.

Spatial repetitive control
An RC for a rotatory system in which the disturbances directly depend on angular position is described in Chen and Yang (Chen and Yang, 2007). Instead of using non-uniform sampling (Hillerström, 1994), the proposal is to use spatial transformation resulting in a nonlinear position invariant (NPI) system. It is then linearised by feedback adaptation and a standard RC is introduced. The use of a nonlinear observer in Yang and Chen (Yang and Chen, 2008) means that the need for state measures can be removed.
Conclusions
This paper has described techniques proposed for tackling the problem of digital RC performance loss when working in variable frequency conditions. HORC leads to a higher computational burden and memory requirements, while sampling period variation involves higher technological complexity.
One has to estimate on-line signal frequency in adaptation schemes while the estimator is not actually needed in HORC schemes. HORC allows LTI analysis, while sampling period variation results in a linear time varying (LTV) framework which entails increased theoretical complexity for stability proofs.
Acknowledgements
This work has been partially supported by the Spanish ME (project DPI2010-15110).
Footnotes
4 This internal model was obtained from the Z-transform of discrete Fourier series expansion of periodic signal
References
álvarez, J.D., Yebra, L.J., Berenguel, M., Repetitive control of tubular heat exchangers. Journal of Process Control, Vol. 17, 2007, pp. 689-701.
Apkarian, P., Adams, R.J., Advanced gain-scheduling techniques for uncertain systems. IEEE Trans Control Syst Tech, Vol. 6, 1998, pp. 21-32.
Cao, Z., Ledwich, G.F., Adaptive Repetitive Control to Track Variable Periodic Signals With Fixed Sampling Rate. IEEE/ ASME Trans on Mechatronics, Vol. 7, 2002, pp. 374-384.
Costa-Castelló, R., Griñó, R., Cardoner, R., Fossas, E., High-Performance Control of a Single-Phase Shunt Active Filter. IEEE Trans on Control Systems Technology, Vol. 17, 2009, pp. 1318-1329.
Costa-Castelló, R., Nebot, J., Griñó, R., Demonstration of the Internal Model Principle by Digital Repetitive Control of an Educational Laboratory Plant. IEEE Trans Education, Vol. 48, 2005, pp. 73-80.
Chang, W.S., Suh, I.H., Kim, T.W., Analysis and Design of Two Types of Digital Repetitive Control Systems., Automatica, Vol. 31, 1995, pp. 741-746.
Chen, C.-L., Yang, Y.-H., Adaptive Repetitive Control for Uncertain Variable-Speed Rotational Motion Systems Subject to Spatially Periodic Disturbances., American Control Conference, 2007 ACC ' 07, 2007, pp. 564-569.
Chen, S.-L., Hsieh, T.-H., Repetitive control design and implementation for linear motor machine tool., Int Journal of Machine Tools and Manufacture, Vol. 47, 2007, pp. 1807- 1816.
Chew, K.K., Tomizuka, M., Digital control of repetitive errors in disk drive systems., IEEE Control Systems Magazine, Vol. 10, 1990, pp. 16-20.
Choi, G.S., Lim, Y.A., Choi, G.H., Tracking position control of piezoelectric actuators for periodic reference inputs., Mechatronics, Vol. 12, 2002, pp. 669-684.
Daley, S., Hätönen, J., Owens, D.H., Active vibration isolation in a mount using a repetitive control approach., Control Engineering Practice, Vol. 14, 2006, pp. 991-997.
Dotsch, H.G.M., Smakman, H.T., den Hof, P.M.J., Steinbuch, M., Adaptive repetitive control of a compact disc mechanism., Proc of IEEE Conf on Decision and Control, Vol. 2, 1995, pp. 1720-1725.
Escobar, G., Hernandez-Briones, P.G., Torres-Olguin, R.E., Valdez, A.A., A repetitive-based controller for the compensation of 6l\pm 1 harmonic components., Proc of the IEEE International Symposium on Industrial Electronics, 2007, pp. 3397- 3402.
Francis, B.A., Wonham, W.M., Internal Model Principle in Control Theory., Automatica, Vol. 12, 1976, pp. 457-465.
Fujioka, H., Stability analysis for a class of networked/embedded control systems: A discrete-time approach., American Control Conference, 2008, pp. 4997-5002.
Griñó, R., Costa-Castelló, R., Digital Repetitive Plug-in Controller for Odd-Harmonic Periodic References and Disturbances., Automatica, Vol. 41, 2005, pp. 153-157.
Hara, S., Yamamoto, Y., Omata, T., Nakano, M., Repetitive control system: a new type servo system for periodic exogenous signals., IEEE Trans on Automatic Control, Vol. 33, 1988, pp. 659-668.
Hattori, S., Ishida, M., Hori, T., Suppression control method for torque vibration of brushless DC motor utilizing repetitive control with Fourier transform., Proceedings of the 6th International Workshop on Advanced Motion Control, 2000, pp. 427-432.
Hillerström, G., On Repetitive Control., 1994.
Hillerström, G., Lee, R.C.H., Trade-offs in Repetitive Control., 1997.
Hu, J.-S., Variable Structure Digital Repetitive Controller., American Control Conference, 1992, pp. 2686-2690.
Huang, W., Cai, L., Tang, X., Adaptive repetitive output feedback control for friction and backlash compensation of a positioning table., Decision and Control, 1998 Proceedings of the 37th IEEE Conference on, 1998. pp. 1250-1251.
Inoue, T., Practical Repetitive Control System Design., Proceedings of the 29 IEEE Conference on Decision and Control, 1990, pp. 1673-1678.
Inoue, T., Nakano, M., Kubo, T., Matsumoto, S., Baba, H., High Accuracy Control of a Proton Synchroton Magnet Power Supply., Proc of the 8th IFAC World Congress, 1981, pp. 216-220.
Kasac, J., Novakovic, B., Majetic, D., Brezak, D., Passive Finite- Dimensional Repetitive Control of Robot Manipulators., IEEE Trans on Control Systems Technology, Vol. 16, 2008, pp. 570-576.
Kim, D.H., Tsao, T.-C., Robust Performance Control of Electrohydraulic Actuators for Electronic Cam Motion Generation., IEEE Trans On Control Systems Technology, Vol. 8, 2000, pp. 220-227.
Laakso, T.I., Valimaki, V., Karjalainen, M., Laine, U.K., Splitting the unit delay [FIR/all pass filters design]., Signal Processing Magazine, IEEE, Vol. 13, 1996, pp. 30-60.
Li, M., He, Z., Xing, Y., Analysis and Design of Repetitive controlled Inverter System with High Dynamic Performance., Power Electronics and Motion Control Conference, IPEMC 2006 CES/IEEE 5th International, 2006. pp. 1-5.
Manayathara, T.J., Tsao, T.-C., Bentsman, J., Rejection of unknown periodic load disturbances in continuous steelcasting process using learning repetitive control approach., IEEE Trans on Control Systems Technology, Vol. 4, 1996, pp. 259 -265.
Nakano, M., Hara, S., Microprocessor-based repetitive control. Microprocessor-Based Control Systems, 1986, pp. 279-296.
Nan, Y., Yu, L., Chen, Z., Wu, A., Study on Repetitive Controller for the Position Servo System of Electrical Injection Molding Machine., Intelligent Control and Automation, 2006 WCICA 2006 The Sixth World Congress on, 2006, pp. 8246-8250.
Olm, J.M., Ramos, G.A., Costa-Castello, R., Stability analysis of digital repetitive control systems under time-varying sampling period., Control Theory Applications, IET, Vol. 5, 2011, pp. 29-37.
Olm, J.M., Ramos, G.A., Costa-Castelló, R., Adaptive compensation strategy for the tracking/rejection of signals with timevarying frequency in digital repetitive control systems., Journal of Process Control, Vol. 20, 2010, pp. 551-558.
Pipeleers, G., Demeulenaere, B., Sewers, S., Robust High Order Repetitive Control: Optimal Performance Trade Offs., Automatica, Vol. 44, 2008, pp. 2628-2634.
Ramos, G.A., Olm, J.M., Costa-Castello, R., Digital repetitive control under time-varying sampling period: An LMI stability analysis., Control Applications, (CCA) Intelligent Control,(ISIC), IEEE, 2009, pp. 782-787.
Sala, A., Computer control under time-varying sampling period: An LMI gridding approach., Automatica, Vol. 41, 2005, pp. 2077-2082.
Songchon, T., Longman, R.W., On the waterbed effect in repetitive control using zero-phase filtering., Proc of the AAS/AIAA Space Flight Mechanics Meeting, 2001, pp. 1321-1340.
Steinbuch, M., Repetitive Control for Systems with Uncertain Period- Time., Automatica, Vol. 38, 2002, pp. 2103-2109.
Steinbuch, M., Weiland, S., Singh, T., Design of Noise and Period-Time Robust High Order Repetitive Control, with application to optical storage. Automatica, Vol. 43, 2007, pp. 2086-2095.
Suh, Y.S., Stability and stabilization of nonuniform sampling systems. Automatica, Vol. 44, 2008, pp. 3222-3226.
Sun, M.-X., He, X.-X., Chen, B.-Y., Repetitive Learning Control for Time-varying Robotic Systems: A Hybrid Learning Scheme., Acta Automatica Sinica, Vol. 33, 2007, pp. 1189-1195.
Tomisuka, M., Tsao, T.-C., Chew, K.-k., Analysis and Synthesis of Discrete-Time Repetitive Controllers., Journal of Dynamic Systems, Measurement and Control, Vol. 111, 1989, pp. 353-358.
Tomizuka, M., Dealing with periodic disturbances in controls of mechanical systems., Annual Reviews in Control, Vol. 32, 2008, pp. 193-199.
Tsao, T.-C., Qian, Y.-X., Nemani, M., Repetitive Control for Asymptotic Tracking of Periodic Signals With an Unknown Period., Journal of Dynamic Systems, Measurement, and Control, Vol. 122, 2000, pp. 364-369.
Wang, Y., Gao, F., III, F.J.D., Survey on iterative learning control, repetitive control, and run-to-run control., Journal of Process Control, Vol. 19, 2009, pp. 1589-1600.
Wang, Y., Wang, D., Zhang, B., Zhou, K., Fractional Delay Based Repetitive Control with Application to PWM DC/AC Converters., Control Applications, 2007 CCA 2007 IEEE International Conference on, 2007a, pp. 928-933.
Wang, Y., Wang, D., Zhou, K., Zhang, B., Ye, Y., Modelling and Robust Repetitive Control of PWM DC/AC Converters., IEEE Int Sym on Intelligent Control, 2007b, pp. 214-219.
Yang, Y.-H., Chen, C.-L., Spatially periodic disturbance rejection using spatial-based output feedback adaptive backstepping repetitive control., American Control Conference, 2008, pp. 4117-4122.
Yu, S.-H., Hu, J.-S., Asymptotic Rejection of Periodic Disturbances With Fixed or Varying Period., Journal of Dynamic Systems, Measurement, and Control, Vol. 123, 2001, pp. 324-329.
Zhou, K., Wang, D., Digital Repetitive Controlled Three-Phase PWM Rectifier., IEEE Transactions On Power Electronics, Vol. 18, 2003, pp. 309-316.
References
Álvarez, J.D., Yebra, L.J., Berenguel, M., Repetitive control of tubular heat exchangers. Journal of Process Control, Vol. 17, 2007, pp. 689-701. DOI: https://doi.org/10.1016/j.jprocont.2007.02.003
Apkarian, P., Adams, R.J., Advanced gain-scheduling techniques for uncertain systems. IEEE Trans Control Syst Tech, Vol. 6, 1998, pp. 21-32. DOI: https://doi.org/10.1109/87.654874
Cao, Z., Ledwich, G.F., Adaptive Repetitive Control to Track Variable Periodic Signals with Fixed Sampling Rate. IEEE/ ASME Trans on Mechatronics, Vol. 7, 2002, pp. 374-384. DOI: https://doi.org/10.1109/TMECH.2002.802730
Costa-Castelló, R., Griñó, R., Cardoner, R., Fossas, E., High-Performance Control of a Single-Phase Shunt Active Filter. IEEE Trans on Control Systems Technology, Vol. 17, 2009, pp. 1318-1329. DOI: https://doi.org/10.1109/TCST.2008.2007494
Costa-Castelló, R., Nebot, J., Griñó, R., Demonstration of the Internal Model Principle by Digital Repetitive Control of an Educational Laboratory Plant. IEEE Trans Education, Vol. 48, 2005, pp. 73-80. DOI: https://doi.org/10.1109/TE.2004.832873
Chang, W.S., Suh, I.H., Kim, T.W., Analysis and Design of Two Types of Digital Repetitive Control Systems., Automatica, Vol. 31, 1995, pp. 741-746. DOI: https://doi.org/10.1016/0005-1098(94)00156-D
Chen, C.-L., Yang, Y.-H., Adaptive Repetitive Control for Uncertain Variable-Speed Rotational Motion Systems Subject to Spatially Periodic Disturbances., American Control Conference, 2007 ACC ´07, 2007, pp. 564-569. DOI: https://doi.org/10.1109/ACC.2007.4282508
Chen, S.-L., Hsieh, T.-H., Repetitive control design and implementation for linear motor machine tool., Int Journal of Machine Tools and Manufacture, Vol. 47, 2007, pp. 1807- 1816. DOI: https://doi.org/10.1016/j.ijmachtools.2007.04.009
Chew, K.K., Tomizuka, M., Digital control of repetitive errors in disk drive systems., IEEE Control Systems Magazine, Vol. 10, 1990, pp. 16-20. DOI: https://doi.org/10.1109/37.50664
Choi, G.S., Lim, Y.A., Choi, G.H., Tracking position control of piezoelectric actuators for periodic reference inputs., Mechatronics, Vol. 12, 2002, pp. 669-684. DOI: https://doi.org/10.1016/S0957-4158(01)00020-4
Daley, S., Hätönen, J., Owens, D.H., Active vibration isolation in a mount using a repetitive control approach., Control Engineering Practice, Vol. 14, 2006, pp. 991-997. DOI: https://doi.org/10.1016/j.conengprac.2005.05.010
Dotsch, H.G.M., Smakman, H.T., den Hof, P.M.J., Steinbuch, M., Adaptive repetitive control of a compact disc mechanism., Proc of IEEE Conf on Decision and Control, Vol. 2, 1995, pp. 1720-1725.
Escobar, G., Hernández-Briones, P.G., Torres-Olguín, R.E., Valdez, A.A., A repetitive-based controller for the compensation of 6lpm 1 harmonic components., Proc of the IEEE International Symposium on Industrial Electronics, 2007, pp. 3397- 3402. DOI: https://doi.org/10.1109/ISIE.2007.4375162
Francis, B.A., Wonham, W.M., Internal Model Principle in Control Theory., Automatica, Vol. 12, 1976, pp. 457-465. DOI: https://doi.org/10.1016/0005-1098(76)90006-6
Fujioka, H., Stability analysis for a class of networked/embedded control systems: A discrete-time approach., American Control Conference, 2008, pp. 4997-5002. DOI: https://doi.org/10.1109/ACC.2008.4587286
Griñó, R., Costa-Castelló, R., Digital Repetitive Plug-in Controller for Odd-Harmonic Periodic References and Disturbances., Automatica, Vol. 41, 2005, pp. 153-157. DOI: https://doi.org/10.1016/j.automatica.2004.08.006
Hara, S., Yamamoto, Y., Omata, T., Nakano, M., Repetitive control system: a new type servo system for periodic exogenous signals., IEEE Trans on Automatic Control, Vol. 33, 1988, pp. 659-668. DOI: https://doi.org/10.1109/9.1274
Hattori, S., Ishida, M., Hori, T., Suppression control method for torque vibration of brushless DC motor utilizing repetitive control with Fourier transform., Proceedings of the 6th International Workshop on Advanced Motion Control, 2000, pp. 427-432. DOI: https://doi.org/10.1109/AMC.2000.862907
Hillerström, G., On Repetitive Control., 1994.
Hillerström, G., Lee, R.C.H., Trade-offs in Repetitive Control., 1997.
Hu, J.-S., Variable Structure Digital Repetitive Controller., American Control Conference, 1992, pp. 2686-2690. DOI: https://doi.org/10.23919/ACC.1992.4792630
Huang, W., Cai, L., Tang, X., Adaptive repetitive output feedback control for friction and backlash compensation of a positioning table., Decision and Control, 1998 Proceedings of the 37th IEEE Conference on, 1998. pp. 1250-1251.
Inoue, T., Practical Repetitive Control System Design., Proceedings of the 29 IEEE Conference on Decision and Control, 1990, pp. 1673-1678. DOI: https://doi.org/10.1109/CDC.1990.203906
Inoue, T., Nakano, M., Kubo, T., Matsumoto, S., Baba, H., High Accuracy Control of a Proton Synchroton Magnet Power Supply., Proc of the 8th IFAC World Congress, 1981, pp. 216-220.
Kasac, J., Novakovic, B., Majetic, D., Brezak, D., Passive Finite- Dimensional Repetitive Control of Robot Manipulators., IEEE Trans on Control Systems Technology, Vol. 16, 2008, pp. 570-576. DOI: https://doi.org/10.1109/TCST.2007.912235
Kim, D.H., Tsao, T.-C., Robust Performance Control of Electrohydraulic Actuators for Electronic Cam Motion Generation., IEEE Trans On Control Systems Technology, Vol. 8, 2000, pp. 220-227. DOI: https://doi.org/10.1109/87.826793
Laakso, T.I., Valimaki, V., Karjalainen, M., Laine, U.K., Splitting the unit delay [FIR/all pass filters design]., Signal Processing Magazine, IEEE, Vol. 13, 1996, pp. 30-60. DOI: https://doi.org/10.1109/79.482137
Li, M., He, Z., Xing, Y., Analysis and Design of Repetitive Controlled Inverter System with High Dynamic Performance., Power Electronics and Motion Control Conference, IPEMC 2006 CES/IEEE 5th International, 2006. pp. 1-5. DOI: https://doi.org/10.1109/IPEMC.2006.4778256
Manayathara, T.J., Tsao, T.-C., Bentsman, J., Rejection of unknown periodic load disturbances in continuous steel-casting process using learning repetitive control approach., IEEE Trans on Control Systems Technology, Vol. 4, 1996, pp. 259 -265. DOI: https://doi.org/10.1109/87.491199
Nakano, M., Hara, S., Microprocessor-based repetitive control. Microprocessor-Based Control Systems, 1986, pp. 279-296. DOI: https://doi.org/10.1007/978-94-009-4708-5_14
Nan, Y., Yu, L., Chen, Z., Wu, A., Study on Repetitive Controller for the Position Servo System of Electrical Injection Molding Machine., Intelligent Control and Automation, 2006 WCICA 2006 The Sixth World Congress on, 2006, pp. 8246-8250.
Olm, J.M., Ramos, G.A., Costa-Castello, R., Stability analysis of digital repetitive control systems under time-varying sampling period., Control Theory Applications, IET, Vol. 5, 2011, pp. 29-37. DOI: https://doi.org/10.1049/iet-cta.2009.0308
Olm, J.M., Ramos, G.A., Costa-Castelló, R., Adaptive compensation strategy for the tracking/rejection of signals with time-varying frequency in digital repetitive control systems., Journal of Process Control, Vol. 20, 2010, pp. 551-558. DOI: https://doi.org/10.1016/j.jprocont.2010.02.002
Pipeleers, G., Demeulenaere, B., Sewers, S., Robust High Order Repetitive Control: Optimal Performance Trade Offs., Automatica, Vol. 44, 2008, pp. 2628-2634. DOI: https://doi.org/10.1016/j.automatica.2008.02.028
Ramos, G.A., Olm, J.M., Costa-Castello, R., Digital repetitive control under time-varying sampling period: An LMI stability analysis., Control Applications, (CCA) Intelligent Control, (ISIC), IEEE, 2009, pp. 782-787. DOI: https://doi.org/10.1109/CCA.2009.5281114
Sala, A., Computer control under time-varying sampling period: An LMI gridding approach., Automatica, Vol. 41, 2005, pp. 2077-2082. DOI: https://doi.org/10.1016/j.automatica.2005.05.017
Songchon, T., Longman, R.W., On the waterbed effect in repetitive control using zero-phase filtering., Proc of the AAS/AIAA Space Flight Mechanics Meeting, 2001, pp. 1321-1340.
Steinbuch, M., Repetitive Control for Systems with Uncertain Period- Time., Automatica, Vol. 38, 2002, pp. 2103-2109. DOI: https://doi.org/10.1016/S0005-1098(02)00134-6
Steinbuch, M., Weiland, S., Singh, T., Design of Noise and Period-Time Robust High Order Repetitive Control, with application to optical storage. Automatica, Vol. 43, 2007, pp. 2086-2095. DOI: https://doi.org/10.1016/j.automatica.2007.04.011
Suh, Y.S., Stability and stabilization of nonuniform sampling systems. Automatica, Vol. 44, 2008, pp. 3222-3226. DOI: https://doi.org/10.1016/j.automatica.2008.10.002
Sun, M.-X., He, X.-X., Chen, B.-Y., Repetitive Learning Control for Time-varying Robotic Systems: A Hybrid Learning Scheme., Acta Automatica Sinica, Vol. 33, 2007, pp. 1189-1195. DOI: https://doi.org/10.1360/aas-007-1189
Tomisuka, M., Tsao, T.-C., Chew, K.-k., Analysis and Synthesis of Discrete-Time Repetitive Controllers., Journal of Dynamic Systems, Measurement and Control, Vol. 111, 1989, pp. 353-358. DOI: https://doi.org/10.1115/1.3153060
Tomizuka, M., Dealing with periodic disturbances in controls of mechanical systems., Annual Reviews in Control, Vol. 32, 2008, pp. 193-199. DOI: https://doi.org/10.1016/j.arcontrol.2008.07.002
Tsao, T.-C., Qian, Y.-X., Nemani, M., Repetitive Control for Asymptotic Tracking of Periodic Signals with an Unknown Period., Journal of Dynamic Systems, Measurement, and Control, Vol. 122, 2000, pp. 364-369. DOI: https://doi.org/10.1115/1.482474
Wang, Y., Gao, F., III, F.J.D., Survey on iterative learning control, repetitive control, and run-to-run control., Journal of Process Control, Vol. 19, 2009, pp. 1589-1600. DOI: https://doi.org/10.1016/j.jprocont.2009.09.006
Wang, Y., Wang, D., Zhang, B., Zhou, K., Fractional Delay Based Repetitive Control with Application to PWM DC/AC Converters., Control Applications, 2007 CCA 2007 IEEE International Conference on, 2007a, pp. 928-933. DOI: https://doi.org/10.1109/CCA.2007.4389352
Wang, Y., Wang, D., Zhou, K., Zhang, B., Ye, Y., Modelling and Robust Repetitive Control of PWM DC/AC Converters., IEEE Int Sym on Intelligent Control, 2007b, pp. 214-219. DOI: https://doi.org/10.1109/ISIC.2007.4450887
Yang, Y.-H., Chen, C.-L., Spatially periodic disturbance rejection using spatial-based output feedback adaptive back stepping repetitive control., American Control Conference, 2008, pp. 4117-4122. DOI: https://doi.org/10.1109/ACC.2008.4587138
Yu, S.-H., Hu, J.-S., Asymptotic Rejection of Periodic Disturbances with Fixed or Varying Period., Journal of Dynamic Systems, Measurement, and Control, Vol. 123, 2001, pp. 324-329. DOI: https://doi.org/10.1115/1.1389309
Zhou, K., Wang, D., Digital Repetitive Controlled Three-Phase PWM Rectifier., IEEE Transactions On Power Electronics, Vol. 18, 2003, pp. 309-316. DOI: https://doi.org/10.1109/TPEL.2002.807150
How to Cite
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Download Citation
CrossRef Cited-by
1. Tingze Fang, Christopher T. Freeman. (2023). Multiple Model Switched Repetitive Control with Application to Tremor Suppression. 2023 American Control Conference (ACC). , p.3859. https://doi.org/10.23919/ACC55779.2023.10156534.
2. German Andrés Ramos Fuentes, Jenny Alexandra Cifuentes Quintero, Iván Dario Melo Lagos. (2016). High performance control of a three-phase PWM rectifier using odd harmonic high order repetitive control. DYNA, 83(198), p.27. https://doi.org/10.15446/dyna.v83n198.53276.
3. Chris Freeman. (2017). Multiple model switched repetitive control. 2017 IEEE 56th Annual Conference on Decision and Control (CDC). , p.4801. https://doi.org/10.1109/CDC.2017.8264368.
4. Marco di Benedetto, Alessandro Faro, Luca Bigarelli, Alessandro Lidozzi, Luca Solero. (2023). Constant Delay-Line Frequency Adaptive Repetitive-Resonant Control for Grid-Tied and Intentional Islanding Operations. IEEE Transactions on Industry Applications, 59(2), p.1944. https://doi.org/10.1109/TIA.2022.3227537.
5. L. Marko, M. Saxinger, M. Bittner, A. Steinboeck, A. Kugi. (2020). Discrete-Time Repetitive Control for Multi-Harmonic Reference Trajectories with Arbitrary Frequency. IFAC-PapersOnLine, 53(2), p.1646. https://doi.org/10.1016/j.ifacol.2020.12.2221.
Dimensions
PlumX
Article abstract page views
Downloads




License
Copyright (c) 2011 Germán Andrés Ramos Fuentes, Josep Olm Miras, Ramón Costa Castelló

This work is licensed under a Creative Commons Attribution 4.0 International License.
The authors or holders of the copyright for each article hereby confer exclusive, limited and free authorization on the Universidad Nacional de Colombia's journal Ingeniería e Investigación concerning the aforementioned article which, once it has been evaluated and approved, will be submitted for publication, in line with the following items:
1. The version which has been corrected according to the evaluators' suggestions will be remitted and it will be made clear whether the aforementioned article is an unedited document regarding which the rights to be authorized are held and total responsibility will be assumed by the authors for the content of the work being submitted to Ingeniería e Investigación, the Universidad Nacional de Colombia and third-parties;
2. The authorization conferred on the journal will come into force from the date on which it is included in the respective volume and issue of Ingeniería e Investigación in the Open Journal Systems and on the journal's main page (https://revistas.unal.edu.co/index.php/ingeinv), as well as in different databases and indices in which the publication is indexed;
3. The authors authorize the Universidad Nacional de Colombia's journal Ingeniería e Investigación to publish the document in whatever required format (printed, digital, electronic or whatsoever known or yet to be discovered form) and authorize Ingeniería e Investigación to include the work in any indices and/or search engines deemed necessary for promoting its diffusion;
4. The authors accept that such authorization is given free of charge and they, therefore, waive any right to receive remuneration from the publication, distribution, public communication and any use whatsoever referred to in the terms of this authorization.




















