



Publicado
Identifying a greenhouse climate model by using subspace methods
Identificación de un modelo del clima en un invernadero mediante métodos por subespacios
DOI:
https://doi.org/10.15446/ing.investig.v30n2.15746Palabras clave:
parametric estimation, subspace identification, greenhouse climate model (en)estimación paramétrica, identificación por subespacios, dinámica del clima en invernaderos (es)
Descargas
This paper presents the development of a climate dynamics model for a greenhouse located on the Bogota plateau. A black-box model was estimated from experimental data, considering a novel system structure derived from a first principles model and experimental tests. It considered two control volumes, one given by the air over the crop and a second one formed by the air trapped by crop foliage. The model was selected from a set of linear, discrete-time, state-variable systems using subspace identification methods. The estimated system was able to predict climate dynamics for both control volumes, having errors below 8%. Such performance was comparable to previous work reported in literature while the obtained model was a low-complexity linear system.
En este trabajo se presenta el desarrollo de un modelo dinámico del clima en un invernadero ubicado en la Sabana de Bogotá. Se realiza la estimación de un modelo tipo caja negra obtenido a partir de datos experimentales. Se propone una estructura a partir de principios físicos que divide el sistema en dos volúmenes de control dados por el aire libre dentro del invernadero y el aire atrapado por el follaje. El modelo es seleccionado, dentro de una familia de sistemas lineales descritos en variables de estado, a través de métodos de identificación por subespacios. El modelo obtenido es capaz de explicar el comportamiento del clima en el aire y en el follaje con errores inferiores al 8%. Este desempeño es comparable al de otros estudios reportados en la literatura, con la ventaja de que el modelo empleado es lineal.
Fredy Orlando Ruiz Palacios1y Carlos Eduardo Cotrino Badillo2
1Ingeniero Electrónico, Pontificia Universidad Javeriana (PUJ), Bogotà, Colombia. M. Sc., Universidad Javeriana (PUJ), Bogotá, Colombia. Ph.D., en Investigación, Politecnico di Torino, Italia. Profesor Asistente, Pontificia Universidad Javeriana (PUJ), Bogotá, Colombia. ruizf@javeriana.edu.co 2 Ingeniero Electrónico, Pontificia Universidad Javeriana, Bogotá, Colombia. M Sc, SUNY at Stony Brook. Profesor Asociado, Pontificia Universidad Javeriana (PUJ), Bogotá, Colombia. ccotrino@javeriana.edu.co
RESUMEN
En este trabajo se presenta el desarrollo de un modelo dinámico del clima en un invernadero ubicado en la Sabana de Bogotá. Se realiza la estimación de un modelo tipo caja negra obtenido a partir de datos experimentales. Se propone una estructura a partir de principios físicos que divide el sistema en dos volúmenes de control dados por el aire libre dentro del invernadero y el aire atrapado por el follaje. El modelo es seleccionado, dentro de una familia de sistemas líneales descritos en variables de estado, a través de métodos de identificación por subespacios. El modelo obtenido es capaz de explicar el comportamiento del clima en el aire y en el follaje con errores inferiores al 8%. Este desempeño es comparable al de otros estudios reportados en la literatura, con la ventaja de que el modelo empleado es lineal.
Palabras clave: estimación paramétrica, identificación por subespacios, dinámica del clima en invernaderos.
ABSTRACT
This paper presents the development of a climate dynamics model for a greenhouse located on the Bogota plateau. A black-box model was estimated from experimental data, considering a novel system structure derived from a first principles model and experimental tests. It considered two control volumes, one given by the air over the crop and a second one formed by the air trapped by crop foliage. The model was selected from a set of linear, discrete-time, statevariable systems using subspace identification methods. The estimated system was able to predict climate dynamics for both control volumes, having errors below 8%. Such performance was comparable to previous work reported in literature while the obtained model was a low-complexity linear system
Keywords: parametric estimation, subspace identification, greenhouse climate model.
Recibido: noviembre 24 de 2009 Aceptado: mayo 11 de 2010
Introducción
A pesar de la antigüedad de la actividad agrícola, sólo en las últimas décadas se han utilizado sistemas de información y control automático para optimizar la calidad y la productividad de las cosechas. En particular, desde los años sesenta se han estudiado estrategias de control para optimizar la producción de cultivos bajo invernadero y se han planteado modelos dinámicos que permiten predecir el comportamiento del clima dentro del invernadero. Estos estudios se han llevado a cabo principalmente en Europa, donde las temperaturas extremas que se presentan en invierno y verano hace necesario optimizar el costo de operación de los sistemas de calefacción y aire acondicionado empleados para no someter a las plantas a temperaturas extremas y posiblemente dañinas. En la Universidad de Wageningen, G. P. Bot ha desarrollado mo-delos dinámicos de invernaderos ubicados en Holanda, a partir de procesos biológicos (Bot, 1983). Adicionalmente, se han estudiado regímenes climáticos para ahorrar energía en los sistemas de con-trol (Bot, 2001; Körner, 2003; Tap et al., 1996). P. F. Martínez, de la Universidad Politécnica de Valencia, ha evolucionado métodos de identificación de invernaderos sometidos a clima mediterráneo empleando algoritmos genéticos para encontrar los parámetros de un modelo físico altamente no lineal (Herrero et al., 2003).
J. B. Cunha, de la Universidade de Tras-Os-Montes e Alto Douro, ha planteado técnicas recursivas de identificación, realizado estudios comparativos sobre diferentes modelos climáticos, y planteado estrategias para el manejo óptimo del clima en invernaderos (Cunha 2003; Cunha et al., 1997; Cunha et al., 2003).El Ghoumari (Ghoumari, 2003) presenta un sistema de control predictivo no lineal manejando restricciones. El modelo de clima fue desarrollado desde principios físicos y calibrado mediante Sequiential Quadratic Programming.
Peter Young, de Lancaster University, ha desarrollado métodos estadísticos de identificación y control (Young et al., 2001; Young et al., 1994), y los ha aplicado en el control automático del clima en invernaderos en Bedford, Reino Unido.
En este artículo se presenta una nueva metodología para la construcción del modelo dinámico del clima en invernaderos. El modelo es estimado dentro de un conjunto de sistemas lineales e invariantes con el tiempo, a partir de datos experimentales. Los resultados obtenidos, determinados como el error entre las señales medidas y la predicción hecha por el modelo, indican que un modelo lineal de tercer orden es capaz de describir la dinámica del clima con una precisión cercana a la lograda con modelos no lineales que tienen en cuenta los fenómenos físicos que condicionan la evolución del sistema, pero con una estructura de baja complejidad.
Configuración experimental
El invernadero estudiado se encuentra en El Rosal (Cundinamarca), a una altura de 2.586 msnm y una temperatura media anual de 14 °C. Tiene unas dimensiones de 77 m de largo por 82 m de ancho; una altura de 2,9 m en los extremos y 4,3 m en la parte central. El área es de 6.314 m2 y el volumen de 23.000 m3. La ventilación lateral es variable manualmente y la ventilación cenital fija cubre un área de 370 m2, 5,6% del área total de la estructura. La cubierta es de polietileno semitransparente (Figura 1).
El invernadero no presenta variables manipulables, y el estudio se enfoca en la construcción de un modelo del efecto de las perturbaciones (clima exterior) sobre el clima dentro del invernadero.
Para medir y almacenar las variables ambientales se utilizaron equipos Spectrum Technologies - WatchDog 450; con precisiones de +/- 0,6 °C y +/- 3% HR para la temperatura y humedad relativa. La radiación solar se midió con un equipo Spectrum Technologies - PAR Quantum Sensor. Se mide la radiación PAR entre 400 y 700 nm y esta medida se transforma en flujo de energía en el espectro completo (W/m2), transformación posible porque el espectro característico de la luz solar es bien conocido (Kania et. al., 2002; Wang et. al., 2000).
Dentro del invernadero se instalaron cuatro instrumentos de medida para registrar temperatura y humedad del aire, ubicados a 2,5 m del suelo y en posiciones equidistantes dentro del recinto. Otros cuatro instrumentos fueron instalados dentro del follaje, a 1,2 m del suelo, a lo largo de una línea de siembra. Durante el experimento las ventanas laterales permanecieron abiertas un 50%, punto normal de operación del invernadero. Para medir las condiciones ambientales en el exterior se instaló un equipo de registro en un punto de la finca alejado de las construcciones, para evitar la influencia en la medida de fuentes de calor o humedad que alteren las condiciones de medida. Este sistema se ubicó a 1,5 m del suelo.
El intervalo de muestreo se fijó en cinco minutos en todos los experimentos. Este período se seleccionó con base en la velocidad de respuesta de los instrumentos y los tiempos usados por otros autores (Cunha et al., 1997; Körner et al., 2004; Salgado et al., 2005; Wang et al., 2000).

Para realizar el proceso de identificación es necesario acondicionar las señales al formato requerido, empleando los siguientes procedimientos:
Transformar la humedad relativa a humedad absoluta, necesario para plantear la ecuación de conservación de masa de agua en términos de la humedad absoluta, Χ y no de la relativa, HR, que es función no lineal de la temperatura y de la humedad absoluta.
Este paso desacopla la medida de humedad de la temperatura.

T es la temperatura en Kelvin, R es la constante universal de los gases, Mves el peso molecular del agua, A, B y C son constantes.
Para realizar una aproximación de parámetros concentrados, en el proceso de identificación se emplea el promedio de las medidas de temperatura y humedad de los cuatro puntos medidos a nivel de aire.
Dado que se usa un medidor de radiación PAR (Qpar), es necesario obtener la potencia radiada en el espectro completo (Qrad). Para esto se usa la hipótesis de que toda la radiación proviene del sol, válida porque no existe iluminación artificial en el invernadero.
3.6 es un factor de escala con las unidades adecuadas, (Kania et al., 2002).
Selección del modelo
Esta sección describe un modelo de parámetros concentrados y la estructura de los modelos usados en el proceso de identificación de invernaderos.
Modelo teórico
Para describir los procesos climáticos internos del invernadero se construyen modelos a partir de las leyes de conservación de energía y masa. En sentido estricto, la evolución del clima en cada punto del invernadero es diferente y por lo tanto es un sistema de parámetros distribuidos, descrito por ecuaciones diferenciales parciales con condiciones de frontera dadas por cada interfaz con el medio exterior (Molina-Aiz, F., 2004). Sin embargo, un modelo de este tipo genera un sistema de infinitas dimensiones, de alta complejidad, y que no es útil para realizar análisis interpretativos ni para el diseño de sistemas de control.
Asumiendo una temperatura uniforme dentro del invernadero Tm, el volumen de control, delimitado por el aire encerrado en el invernadero, presenta la siguiente ecuación de conservación de energía:
 (3)
(3)
Donde Cairees la capacidad térmica del aire del invernadero; Qradel flujo de energía proveniente de la radiación solar; Qasel flujo de calor debido al gradiente térmico existente entre el aire y el suelo; Qacel flujo de calor a través de la cubierta, generado por el gradiente térmico entre el aire exterior y el interior; y Qvel flujo de calor debido al intercambio de aire entre el interior y el exterior.
Para el modelo de temperatura del suelo se define un segundo volumen de control. Éste se toma como una capa de tierra que interactúa con el aire y con el subsuelo (Bot, 1983). La ecuación para la temperatura del suelo Tmes:
Donde Cmes la capacidad térmica del suelo y Qsses el flujo de calor debido al gradiente térmico entre el suelo y el subsuelo. Este modelo considera que el subsuelo es una variable de entrada, no manipulable, y que evoluciona de manera independiente al clima del invernadero.
La humedad absoluta Xes la cantidad de vapor de agua presente en el aire, medida como masa de vapor de agua por unidad de volumen; y su comportamiento en un volumen limitado se describe a partir del balance de masa de vapor de agua en la frontera del volumen (Tap, 1996):

donde Vmes el volumen efectivo del invernadero; Φaire(XΔXΔ-X)es el flujo de vapor de agua hacia o desde el exterior; E es la transpiración del cultivo generada por fenómenos biológicos; Cairees la constante de saturación de agua en el aire y Mces la condensación de vapor en las paredes del invernadero y en las hojas del cultivo.
(3), (4) y (5) conforman un sistema de ecuaciones diferenciales no lineales acopladas y son la formulación en variables de estado del clima dentro del invernadero.
La dificultad de la formulación de un modelo teórico para un invernadero específico radica en la complejidad de estimar cada
uno de los términos que forman el sistema de ecuaciones, ya que cada uno de los flujos de calor y de vapor de agua es descrito por una función no lineal de las condiciones climáticas internas y externas, parametrizada por la geometría del invernadero, el tipo de siembra y otros factores biológicos.
Modelo paramétrico
En esta sección se construye, a partir de datos experimentales, un modelo dinámico lineal, en tiempo que describe el clima en el invernadero. El modelo se parametriza como un único sistema dinámico de múltiples entradas y salidas en variables de estado, debido a que se dispone de métodos de identificación eficientes y robustos para este tipo de sistemas.
El modelo está formado por un conjunto de ecuaciones diferencia de primer orden:
donde k es la variable independiente tiempo, wk∈R''el vector de las m entradas del proceso en el instante k, yk∈R'el vector de las l salidas del proceso en el instante k,xk∈R' el vector de las n variables de estado del proceso en el instante k, y wk∈R' y vk∈R'son las señales vectoriales estocásticas, no medibles, que representan el ruido de proceso y la medida del sistema. Se asume que son secuencias vectoriales de ruido blanco, estacionarias y de media cero, con:

Las matrices A,B,C,Dparametrizan el modelo, Q,R,Sson las matrices de covarianza de las secuencias de ruido. Estas siete matrices deben ser estimadas a partir de los datos experimentales disponibles.
Selección de variables
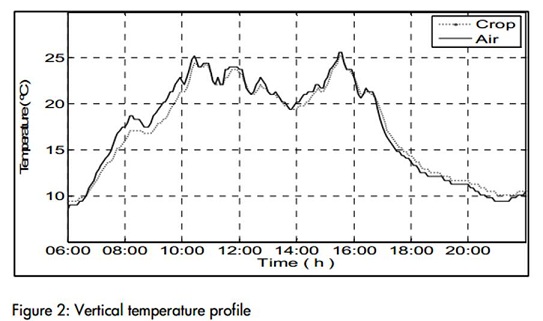
Aunque la mayoría de autores consideran que el ambiente dentro del invernadero es uniforme verticalmente (Bot, 1983; Herrero et al., 2003; Piñón et al., 2002; Trigui et al., 2001), para este invernadero se encontró que se manifiestan gradientes importantes entre el aire que se encuentra cerca a las plantas y el aire sobre el cultivo.
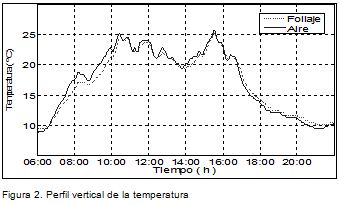
La Figura 2 muestra el comportamiento de la temperatura en un punto del invernadero. El aire cercano al follaje presenta un retardo, tanto en el calentamiento como en el enfriamiento. Además los cambios rápidos de temperatura que sufre el aire superior son atenuados dentro del follaje. Estos dos elementos sugieren la hipótesis de que el follaje tiene un efecto de filtro pasa bajo que aumenta el orden del sistema.
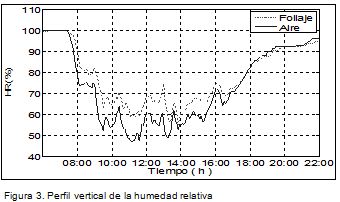
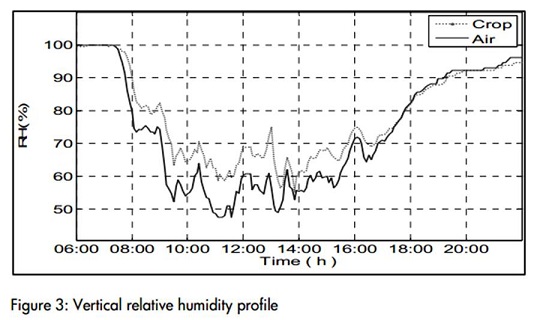
El comportamiento de la humedad es diferente, el follaje siempre exhibe una humedad mayor a la del aire, causada por la evapotranspiración de las plantas. Las variaciones temporales son similares en los dos puntos. No se puede decir que la humedad en el follaje sea una versión filtrada de la humedad del aire, más bien, es
es la misma señal con un desplazamiento que varía con las condiciones ambientales. La evapotranspiración del cultivo es el flujo de agua hacia el am-biente en forma de vapor. Cuando el déficit de presión de vapor se acerca a cero la hoja no emite vapor al aire. Este comportamiento es coherente con el comporta-miento observado en el experimento (Figura 3).
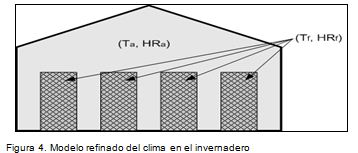
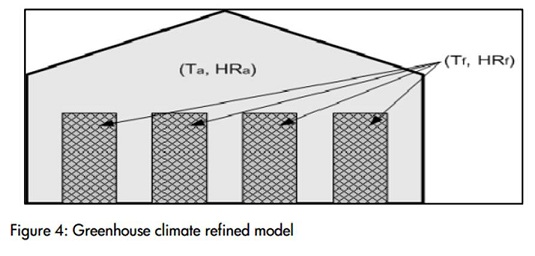
Aunque existen gradientes importantes en dirección vertical, es viable una aproximación de parámetros concentrados. Para ello se propone un modelo compuesto por dos volúmenes de control (Figura 4). El primero es el aire atrapado en el invernadero fuera del follaje y corresponde al aire interior usado en la mayoría de aproximaciones. El segundo volumen corresponde al aire encerrado por el follaje. En la interfaz entre los dos volúmenes ocurren intercambios de calor por conducción y convección y flujos de masa de vapor de agua a causa de gradientes de presión parcial. La estructura del modelo a identificar es la siguiente:
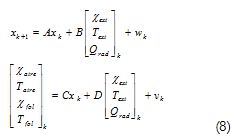
Las entradas del sistema son la temperatura externa Taire, la humedad absoluta externa Xairey la radiación solar Qrad. Las salidas son la temperatura Tairey humedad Xairedel aire dentro del invernadero y la temperatura Tfoly humedad Xfolatrapada por el follaje.
Dado que el comportamiento del microclima dentro del follaje depende considerablemente del tipo de siembra y la variedad de flor que se encuentre plantada, la temperatura y la humedad del aire dentro del follaje, se toma un punto y se usa directamente en el proceso de identificación. Adicionalmente, este enfoque se justifica porque el modelo físico indica que la relación es unidireccional, el clima del aire sobre el cultivo afecta el microclima del follaje, pero, como el volumen de aire encerrado es mucho menor que el volumen total del invernadero, la influencia en sentido inverso es despreciable.
Resultados experimentales
Para la identificación del modelo del clima usando la estructura planteada en (8), se tomaron dos conjuntos de datos durante diferentes días. El primero, llamado conjunto de identificación, está compuesto por 1.650 muestras de cada variable, tomadas durante 138 horas continuas. Este conjunto se emplea para estimar el orden del sistema n y las matrices A, B, C y D. El segundo, denominado conjunto de validación, contiene 860 muestras de cada variable, tomadas durante 72 horas continuas. Este conjunto es usado para medir la calidad de los modelos estimados, comparando su capacidad explicativa con datos que no fueron empleados para su construcción.
Estimación del orden
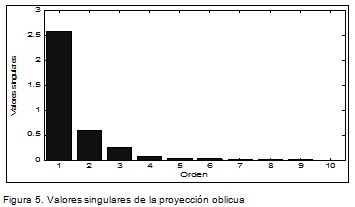
En la identificación por subespacios (Overchee et al., 1996), el orden del sistema a identificar corresponde a los valores singulares no nulos de la proyección oblicua del subespacio generado por las salidas futuras y paralelo al subespacio de las entradas futuras, sobre el espacio de las entradas y salidas pasadas. De manera intuítiva, la dimensión de este subespacio corresponde a la información de las salidas futuras que no puede ser explicada por las entradas futuras y que por lo tanto depende de las entradas y salidas pasadas. La Figura 5 muestra los valores singulares obtenidos para el conjun-to de identificación. Este resultado sugiere que el orden del siste-ma que ha generado los datos es n=3.
El modelo físico descrito en la sección anterior y los experimentos preliminares también sugieren un orden n=3, dos ecuaciones diferenciales para el comportamiento del aire sobre el cultivo y una más para el comportamiento de la temperatura del follaje, que resulta ser una versión filtrada de la temperatura del aire superior. La humedad dentro del follaje presenta una dinámica muy similar a la del aire superior, pero con un desplazamiento variable que depende de la temperatura, del déficit de presión de vapor y de la radiación solar.
Comportamiento del modelo
Empleando el algoritmo por subespacios robusto para identificación combinada determinística-estocástica propuesto por Overchee et al. (1996), se identifica un modelo de orden 3.
Para medir la calidad del modelo se usa el error porcentual de simulación:
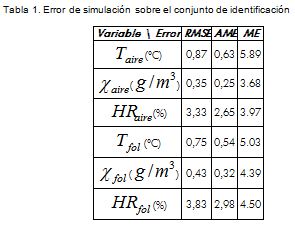
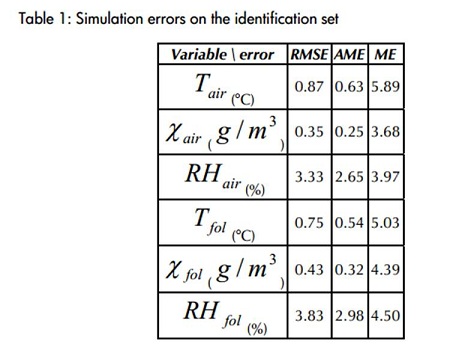
donde Ykes la salida del sistema físico, Y-kes la salida estimada por el modelo identificado y N es la duración del experimento.La Tabla 1 resume el comportamiento del modelo estimado sobre el conjunto de identificación. En ésta, además del ME, se incluyen los errores cuadrático medio (RMSE) y absoluto medio (AME).
El error porcentual obtenido es inferior al 6% para todas las variables estimadas. La humedad, absoluta y relativa, presenta un error casi dos puntos inferior al de la temperatura.
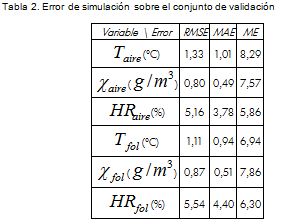
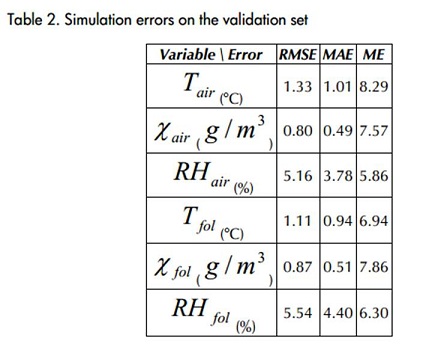
A continuación se evalúa la validez del modelo identificado, simulando el comportamiento del clima en el invernadero con los datos del conjunto de validación. Los resultados se exponen en la Tabla 2.
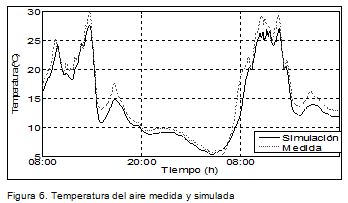
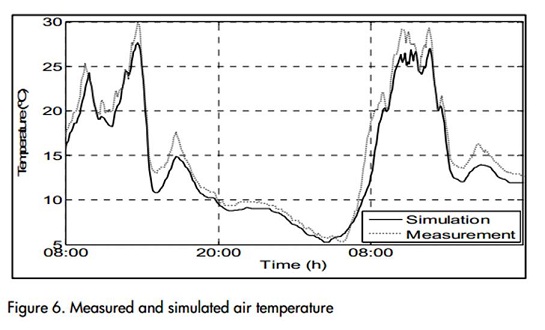
El comportamiento de la temperatura, tanto del aire como del follaje, es descrito adecuadamente por el modelo identificado. Nótese que el error RMS es de 1,33 °C, mientras que la precisión del instrumento de medida es de 0,6 °C. La Figura 6 muestra el comportamiento de la temperatura del aire en un intervalo del conjunto de validación. El modelo describe correctamente la evolución, excepto en los periodos de temperaturas altas, en los que el modelo predice temperaturas inferiores a las que realmente se presentan.
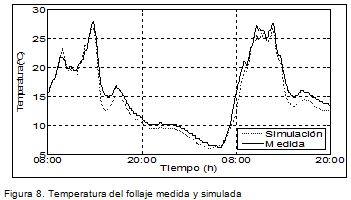
La temperatura y la humedad dentro del follaje son descritas adecuadamente por el modelo (Figura 8) para el comportamiento de la temperatura.
El modelo obtenido presenta un desempeño comparable a los resultados existentes en la literatura (ver, por ejemplo, Cunha, 2003; Herrero et al., 2003; Salgado y Cunha, 2005; Wang et al., 2000). En los trabajos citados se obtienen modelos que presentan errores RMSE alrededor de 1,5 °C para Tairey 5% Xfol. El modelo propuesto en este trabajo ofrece algunas ventajas adicionales. En primer lugar, es un sistema lineal de bajo orden; segundo, es capaz de describir adecuadamente el microclima del follaje.
Conclusiones
Se ha ofrecido el desarrollo de un modelo dinámico del clima en un invernadero ubicado en la Sabana de Bogotá. El modelo obteni-do presenta errores de simulación en los mismos órdenes de magnitud que trabajos previos, con la diferencia de que la estructura usada es lineal. Aunque no se usaron directamente en el proceso de identificación, la construcción de modelos con base en principios físicos es un paso fundamental en el proceso de identificación, ya que permite entender la estructura del sistema dinámico en estudio e interpretar los resultados obtenidos en el proceso de identificación y compararlos con el comportamiento físico de la planta.
La selección del conjunto de modelos posibles en un problema de identificación es un paso fundamental, y en este proyecto tanto la representación en variables de estados de sistemas lineales como el empleo de los algoritmos por subespacios fueron adecuados para encontrar los parámetros del sistema dinámico multivariable.
La modificación propuesta de la estructura del sistema, separando la dinámica del aire atrapado por el follaje de la del aire superior, permitió incrementar la calidad del sistema, sin sufrir un gran aumento del costo computacional. La estructura utilizada no se ha encontrado en la literatura utilizada y por tanto es un nuevo aporte que ofrece este trabajo.
Un siguiente paso en el área de agricultura de precisión es el de usar el sistema obtenido para diseñar estrategias de control basadas en modelos que optimicen la producción de cultivos bajo invernaderos.
Por otro lado, si se desea mejorar la calidad del modelo es necesario incluir más información en el proceso de identificación. En este proyecto no se midieron variables que influyen en el proceso del clima como la velocidad y dirección del viento y la temperatura del suelo y el subsuelo.
Bibliografía
Bot, G. P. A., Greenhouse climate: from physical process to a dynamical model., Ph D. thesis, Agricultural University of Wageningen, Holland, 1983.
Cunha, J.B., De Moura Oliveira, J. P., Optimal management of greenhouse environments., EFITA Conference, 2003.
Cunha, J. B., Greenhouse climate models: An overview., EFITA Conference, 2003.
Cunha, J. B., Couto, C., Ruano, A. E., Real-time parameter estimation of dynamic temperature models for greeenhouse environmetal control., Control Engineering Practice, 1997
Ghoumari, M. Y.El., Optimización de la producción de un invernadero mediante control predictivo no lineal., Ph.D. thesis, Universidad Autónoma de Barcelona, Spain, 2003.
Herrero, J.M., Martínez, M., Blasco, X., Ramos, C., Rodriguez, S., Identificación paramétrica del modelo no lineal de un invernadero mediante algoritmos genéticos., XXIV Jornadas de Automática, 2003.
Kania, S. Giacomelli, G., Solar radiation availability for plant growth in Arizona controlled environment agriculture systems., Proc. 30th National agricultural plastics congress, 2002.
Körner, O., Crop based climate regimes for energy saving in greenhouse cultivation., PhD thesis, Agricultural University of Wageningen, Holland, 2003.
Körner, O., Challa, H., Temperature integration and process based humidity control in chrysanthemum., Computers and electronics in agriculture, No. 43,2004, pp. 121.
Overchee, V., Moor, B. L., Subspace identification for linear systems., Kluwer Academic Publishers, Dordrecht, Holland, 1996.
Molina-Aiz, F., Valera, D., Alvarez, A., Measurement and simulation of climate inside Almeria-type greenhouses using computational fluid dynamics., Agricultural and Forest Meteorology, No. 125, 2004, pp. 33-51.
Piñon, S., Peña, M., Alvarez, h., Kuchen, B., Control predictivo con restricciones para el clima de un invernáculo., DYNA, Revista de la Facultad de Minas de la Universidad Nacional de Colombia, No. 135, 2002, pp.1125.
Salgado, P., Cunha, J. B., Greenhouse climate hierarchical fuzzy modeling., Control Engineering Practice, No. 13, 2005,pp. 613628.
Tap, R.F., van Willigenburg, L. G., van Straten, G., Experimental results of receding horizon optimal control of greenhouse climate., Proc. Math. and Contr. Applic. in Agric. and Hort, No. 406,1996, pp. 229238.
Triguia, M., Barringtona, S., Gauthierb, L., A strategy for greenhouse climate control, part i: Model development., Journal of Agricultural Engineering Research, 2001.
Wang, S., Boulard, T., Predicting the microclimate in a naturally ventilated plastic house in a Mediterranean climate., Journal of Agricultural Engineering Research, Vol. 75, No. 1, 2000,pp. 2738.
Young, P., Chotai, A., Data-based mechanistic modeling, forecasting and control., IEEE Control systems magazine, Vol. 21, No. 5, 2001, pp.1427.
Young, P. C., Lees, M. J., Chotai, A., Tych, W., Chalabi, Z. S., Modeling and PIP control of a glasshouse micro-climate., Control Engineering Practice, Vol. 2, No. 4, 1994, pp.591604.
Identifying a greenhouse climate model by using subspace methods
Fredy Orlando Ruiz Palacios1 y Carlos Eduardo Cotrino Badillo2
1 Electronic Engineering, Pontificia Universidad Javeriana (PUJ), Bogotà, Colombia. M. Sc., Universidad Javeriana (PUJ), Bogotá, Colombia. Ph.D., Research, Politecnico di Torino, Italia. Assistant Professor, Pontificia Universidad Javeriana (PUJ), Bogotá, Colombia. ruizf@javeriana.edu.co 2 Electronic Engineering, Pontificia Universidad Javeriana, Bogotá, Colombia. M Sc, SUNY at Stony Brook. Associate Professor, Pontificia Universidad Javeriana(PUJ), Bogotá, Colombia. ccotrino@javeriana.edu.co
Abstract
This paper presents the development of a climate dynamics model for a greenhouse located on the Bogota plateau. A black-box model was estimated from experimental data, considering a novel system structure derived from a first principles model and experimental tests. It considered two control volumes, one given by the air over the crop and a second one formed by the air trapped by crop foliage. The model was selected from a set of linear, discrete-time, state-variable systems using subspace identification methods. The estimated system was able to predict climate dynamics for both control volumes, having errors below 8%. Such performance was comparable to previous work reported in literature while the obtained model was a low-complexity linear system.
Keywords: Parametric estimation, subspace identification, greenhouse climate model.
Received: november 24th 2009
Accepted: may 11th 2010
Introduction
Even though agriculture is a millenary old economic activity, using tools like automatic control and model identification have only been introduced during the last few decades. Instrumentation and control strategies have been developed and applied for optimising crop production since the 1960s and, more recently, modern modelling and identification tools have enhanced the forecasting and prediction of the climate variables inside a greenhouse environment. Most of these models and applications come from Europe where the summer and winter seasons' extreme temperature make the rational use and optimal control of HVAC equipment required to protect the plants mandatory in such extreme conditions. G.P. Bot at Wageningen Agricultural University has developed dynamic models for greenhouses in the Netherlands and Indonesia from biological basic principles (Bot 1983). Further work includes external weather conditions for designing energy control systems (Körner 2003, Tap et al., 1996, Bot 2001). P.F. Martínez at the Universidad Politécnica in Valencia has applied genetic algorithms to building a non-linear green house model for Mediterranean conditions (Herrero et al., 2003).
J.B. Cunha at the Universidade de Tras-Os-Montes e Alto Douro has used recursive identification techniques for building several climate models, comparing their results and configuring different control strategies for optimising energy consumption (Cunha 2003), (Cunha et al., 1997), (Cunha et al., 2003).
Ghoumari (Ghoumari 2003) built a non-linear model predictive controller with restrictions; the climate model was obtained from basic principles and calibrated by sequential quadratic programming.
Peter Young at Lancaster University has developed statistical methods for identification and control and applied them to automatic control of greenhouses in Bedford, UK (Young et al., 1994, Young et al. 2001).
This paper describes a new methodology for building a dynamic model of a greenhouse climate. The selected model was estimated from a set of linear, time invariant models, using experimental data. The results of this procedure, weighted as being the error between measured variables and predicted ones, showed that a low complexity, third-order linear model described internal climate dynamics with a precision close to that of more complex first principle-based non-linear models.
Experimental configuration
The modelled greenhouse was located in the country side of "El Rosal", a small village on the Bogota plateau lying at 2,586 meters above sea-level, having an annual average temperature of 14oC. It covered an area of 6,314 m2 (77 m x 82m) and had variable height of 2.9 m for the lateral walls and 4.3 m in the central part, giving 23,000 m3 total volume. Side ventilation was manually controlled and zenith was fixed, covering 370 m2, close to 5.6% of total area (Figure 1). The covering material was average transparency polyethylene. There were no manipulated variables and the model reflected the effect of external weather conditions on internal greenhouse climate variables.
Temperature and relative humidity (RH) were measured and logged with a WatchDog 450 (Spectrum Technologies) having ± 0.6°C and ± 3% RH accuracy. PAR radiation, from 400 to 700 nm, was measured with a PAR Quantum sensor (Spectrum Technologies). These measurements were transformed to total energy (W/m2) over the full solar radiation spectrum, this being a valid calculation since the solar radiation spectrum is very well-defined, as reported by Wang et al., 2000, and Kania et al., 2002.
Temperature and RH were registered at 8 different sites inside the greenhouse: 4 of them placed at 2.5 m above ground level and at symmetric locations and the other four were located inside crop foliage at 1.2 m above ground level and in the same ground bed. Side ventilation inlets were kept at 50% opening throughout all the experiments, this being the greenhouse's normal operating point. Figure 1: Greenhouse structure A temperature and RH recorder was installed far away from the greenhouse structures to ascertain external weather variables so that any influence from the greenhouse environment was negligible. This recorder was placed at 1.5 m above ground level.
Sampling time was fixed at 5 minutes for all experiments and variables, based on instrument response time, logger memory size and the time settings reported by other authors (Körner et al., 2004), (Cunha et al., 1997), (Salgado et al., 2005), (Wang et al., 2000).
The row data from the meters had to be conditioned and set in the format required by the software tool for identification, as follows:
– RH was converted to absolute humidity, χ, this transformation uncoupled the humidity measurement from temperature and allowed using the mass conservation equation for water regarding χ, instead of RH, which is a non-linear function of temperature and absolute humidity.
The transformation was defined by the equation:

T T temperature (K); R universal gas constant, water molecular weight and constants A, B and C.
–The four temperatures and RH measurements of greenhouse air were averaged to obtain lumped parameter approximation.
–Since a PAR measurement was available and there was no artificial illumination, all the incident radiation was coming from the sun. PAR data (Qpar ), was converted to radiated power over the complete spectrum ( Qrad). The conversion was done using the relationship:
3.6 was a scale factor having the proper units (Kania et al., 2002).
Model selection
This section describes a lumped parameters model along with the model structure used for identifying the greenhouse climate.
Theoretical model
A model for the greenhouse's internal climate was built from energy and mass conservation laws. Strictly, climate evolution at every point of greenhouse volume would be different and the resultant model would, therefore, be a distributed parameters one, described by a set of partial differential equations having boundary conditions at each interface with the external environment (Molina-Aiz, F 2004). This type of model would be highly complex, having infinite dimensions and useless for drawing analytical conclusions and for designing a control system.
Assuming uniform temperature, Ta , in the control volume limited by the air enclosed in the greenhouse, the energy conservation equation would be:
 (3)
(3)
Where: Caire was greenhouse air thermal capacitance and Qrad the heat flow coming from solar radiation. Q as was heat flow due to the temperature gradient between air and soil. Qac was heat flow through the plastic cover due to the temperature difference between internal and external air and Qv was the heat flow associated with air exchange through greenhouse ventilation openings.
A second control volume was defined to enclose a layer of soil interacting between greenhouse air and sub soil (Bot 1983). The equation for soil temperature Ts was:
Cs was soil thermal capacitance and Qss heat flow due to the temperature gradient between the soil and the sub soil. This approach considered that sub soil temperature was an input variable, not manipulable and independent of greenhouse climate.
Absolute humidity χ, was the amount of water vapour present in the air, measured as the mass of water vapour per volume unit. Its behaviour inside a limited volume was described from a mass balance in the control volume (Tap 1996)

Vh greenhouse effective volume;Øvent(χext −χ) net water vapour flow in or out bound the control volume; E was crop transpiration produced by biological phenomena, Csac water in air saturation constant and Mc was the vapour condensation on the greenhouse walls and on crop leaves.
These three equations (3), (4) and (5) were non coupled differential equations and corresponded to the greenhouse climate model's state variable formulation.
The hardest step, when formulating a theoretical model for a specific greenhouse, stems from the complexity estimating each
equation term, since all heat and vapour flows are non-linear functions of both internal and external climate conditions, and, all equations parameters depended on greenhouse layout, dimensions, type of plant grown and other biological factors.
Parametric model
A linear, discrete, time-invariant model was estimated to describe the greenhouse climate from the experimental data gathered from the field-work. The model was assembled as a multiple input, multiple output dynamic system using state space formulation. This model was identified by using available algorithms which are efficient and robust.
The resulting model consisted of a set of first-order difference equations:
Where k was the independent time variable; uk∈Rm was a vector of m process inputs at instant k, yk∈Ri was a vector of l process outputs at instant k,; xk∈Rn was a vector of n process state variables at instant k,w k ∈ Rn and vk∈ Ri were vector arrays of stochastic, non-measurable variables presenting noise in the process and in the measurements. These variables were assumed to be stationary white noise having zero mean, related by:
Matrices A,B,C,D described the state space model. were the covariance matrices for the noise sequences. These seven matrices had to be estimated from the experimental data gathered during the experiments and conditioned, as already described.
Selecting the variables
Even though several authors have assumed that the greenhouse environment is uniform in a vertical direction (Piñon et al., 2002, Trigui et al., 2001, Herrero et al., 2003, Bot 1983), the experimental data for this greenhouse showed a significant gradient between the air close to the plants and the air over the plants.
Figure 2 illustrates temperature variations in a vertical direction at any point inside the greenhouse. Air temperature close to the foliage showed a time delay for heating and cooling cycles. Furthermore, the rap id temperature changes experienced by the upper air were attenuated by the foliage. These two facts were represented in the model by a low pass filter, which increased model order.
Evapotranspiration is the flow of water vapour from the plant towards the air. Several empirical models have described this phenomenon; flow is a function of the solar radiation captured by the plant, leaf temperature and vapour pressure deficit in all of
of them, accounting for the difference between current partial vapour pressure and vapour saturation pressure. When this deficit was close to zero, leaves did not release vapour and net flow to the environment was zero. As shown in (Figure 3), this behaviour agreed with the experimental data.
Even though the vertical gradients were significant, it was still possible to develop a lumped parameters model by defining two control volumes (Figure 4). The first one enclosed the air in the greenhouse volume outside the foliage and corresponded to the “internal air volume” used in most models. The second volume corresponded to air entrapped inside the foliage. There was heat exchange in the interface between the two regions due to conduction and convection and mass flows produced by differences in partial pressure. The structure of the model to be identified was:
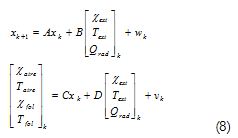
The input variables were: χext the external air absolute humidity; Text external air temperature and Qrad solar radiation. The output variables were: temperature Taire and absolute humidity χlof of greenhouse internal air and temperature Tfol and absolute humidity χlof of the foliage trapped air.
Since the micro climate of foliage entrapped air was heavily dependent on the type of crop and plant distribution and concentration, all the temperature and RH data measured were used directly in the identification procedure. These approximations were supported by the unidirectional nature of the relationship between both volumes. The climate of the air over the crop affected the climate of foliage entrapped air but this was not true in the reverse direction, since the volume of free air was much larger than the volume of entrapped air.
Experimental results
Two sets of measurements were gathered over different days for identifying the process model described by equation 8. The first, named "identification set," included 1,650 samples of each variable, taken over a period of 138 hours. This set was used for estimating model order n and matrices A, B, C and D. The second set, named "validation set," included 860 samples taken over a period of 72 hours. This data was used to test the quality of the resulting model, evaluating the identified model's predictive capabilities with a data set not used for model construction.
Model order estimation
The method used for building the model was the sub space identification method developed by Overchee et al., 1996. In this approach, model order corresponds to the number of non-zero singular values of the oblique projection of the subspace spanned by those future output variables parallel to the future input variables space, over the space spanned by the past inputs and output variables. Intuitively, the dimension of the projected subspace corresponds to the content of future outputs which cannot be generated by future inputs and, therefore, must be generated by the system's past history. The singular values of the oblique projection for the identification data set are shown in Figure 5 From these results, the suggested order for the system was n=3.
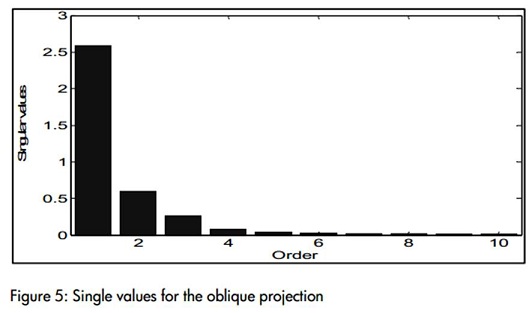
The physical model described in the previous section and the field experiments suggested a model order n = 3. One differential equation described the behaviour of the air over the plants and another one the foliage entrapped air temperature, related to air temperature through a low pass filter. No equation was required for entrapped air humidity since its dynamic were close to that of over air humidity, having a variable bias function of temperature, vapour pressure deficit and solar radiation.
Model response
Using the Overchee et al., 1996 identification algorithm via subspaces combining deterministic and stochastic variables, model order was n = 3. A percentage simulation error was applied to assess the quality of the resulting model:
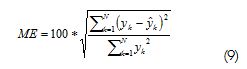
Where: Yk was output variable estimated by the model; measured output variable and N samples number or experiment time length. Table 1 summarises identified model outcomes on the identification set. Additional to ME error, two other measurements were included: root mean squared error (RMSE) and absolute mean error (AME).
The ME was less than 6% for all estimated variables. Humidity was predicted with ME 2 percentage points lower than temperature.
The second quality test for the identified model was a simulation of the greenhouse climate using validation set data. Resulting errors are listed in Table 2.
The identified model closely described the evolution of air and foliage temperatures. RMS error was 1.33°C, but instrument precision was 0.6°C. Figure 6 shows the variation of air temperature using validation set data. The model closely followed the temperature variations, except for the higher values where the model predicted somehow lower temperatures than the actual ones.
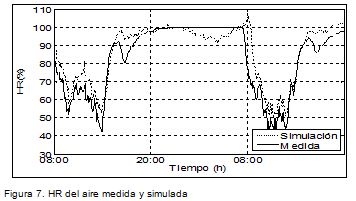
For the air relative humidity, the model produced convenient data for daylight periods, when RH was low (Figure 7). At night, when there was saturation of water vapour in air, model outcomes did not match the actual data. This was due to the non-linear characteristic of this process: plant evapotranspiration stoppede and a negative flow showed up due to water condensation on the plastic side walls and on plant leaves. The linear model failed to describe this behaviour and, at some intervals, RH rose to over 100%.
Figure 8 shows convenient correspondence between measured and estimated data for temperature for the variables in the air entrapped in the foliage.
Identified model performance was comparable to models reported by other authors (Wang et al., 2000), (Cunha, 2003), (Herrero et al., 2003) and (Salgado and Cunha, 2005) where RMSE errors were around identified model results within reported error ranges: RMSE values around 1.5°C for Taire and 5% for χaire . The proposed model showed some additional features; it was a low order lineal model and it adequately described the climate inside the foliage.
Conclusions
The paper has described the development of a climate model for a greenhouse located in an inter-tropical region. The resulting model bore similar errors to those of equivalent order models reported in the technical literature using a linear structure. Even though the approach used did not rest on basic physical principles, knowledge and understanding of these principles is a key step in identification, since they allow comprehending the model structure and dynamic relationships and facilitate interpreting the resultant data and comparing it to actual measured data.
A second topic regarding identification was the selection of a possible model set, like state space representation choice and using an algorithm based on subspaces. Such selection was adequate for finding the multivariable dynamic system's parameters.
The modification introduced into the model's structure separating the dynamics of air volume over the crop from the dynamics of foliage entrapped air rendered better model quality without significantly increasing computational load. This structure has not been reported up to now and thus represents a novel contribution in this field of modelling.
More variables must be included in experimental and identification tasks for future work and to increase model quality. These variables would be wind speed and direction, soil and sub soil humidity and temperature.
A following step towards precision agriculture is the deployment of identified models for designing model-based control strategies aimed at production optimisation in climate-controlled greenhouses.
References
Bot, G. P. A., Greenhouse climate: from physical process to a dynamical model., Ph D. thesis, Agricultural University of Wageningen, Holland, 1983.
Cunha, J.B., De Moura Oliveira, J. P., Optimal management of greenhouse environments., EFITA Conference, 2003.
Cunha, J. B., Greenhouse climate models: An overview., EFITA Conference, 2003.
Cunha, J. B., Couto, C., Ruano, A. E., Real-time parameter estimation of dynamic temperature models for greeenhouse environmetal control., Control Engineering Practice, 1997
Ghoumari, M. Y.El., Optimización de la producción de un invernadero mediante control predictivo no lineal., Ph.D. thesis, Universidad Autónoma de Barcelona, Spain, 2003.
Herrero, J.M., Martínez, M., Blasco, X., Ramos, C., Rodriguez, S., Identificación paramétrica del modelo no lineal de un invernadero mediante algoritmos genéticos., XXIV Jornadas de Automática, 2003.
Kania, S. Giacomelli, G., Solar radiation availability for plant growth in Arizona controlled environment agriculture systems., Proc. 30th National agricultural plastics congress, 2002.
Körner, O., Crop based climate regimes for energy saving in greenhouse cultivation., PhD thesis, Agricultural University of Wageningen, Holland, 2003.
Körner, O., Challa, H., Temperature integration and process based humidity control in chrysanthemum., Computers and electronics in agriculture, No. 43,2004, pp. 121.
Overchee, V., Moor, B. L., Subspace identification for linear systems., Kluwer Academic Publishers, Dordrecht, Holland, 1996.
Molina-Aiz, F., Valera, D., Alvarez, A., Measurement and simulation of climate inside Almeria-type greenhouses using computational fluid dynamics., Agricultural and Forest Meteorology, No. 125, 2004, pp. 33-51.
Piñon, S., Peña, M., Alvarez, h., Kuchen, B., Control predictivo con restricciones para el clima de un invernáculo., DYNA, Revista de la Facultad de Minas de la Universidad Nacional de Colombia, No. 135, 2002, pp.1125.
Salgado, P., Cunha, J. B., Greenhouse climate hierarchical fuzzy modeling., Control Engineering Practice, No. 13, 2005,pp. 613628.
Tap, R.F., van Willigenburg, L. G., van Straten, G., Experimental results of receding horizon optimal control of greenhouse climate., Proc. Math. and Contr. Applic. in Agric. and Hort, No. 406,1996, pp. 229238.
Triguia, M., Barringtona, S., Gauthierb, L., A strategy for greenhouse climate control, part i: Model development., Journal of Agricultural Engineering Research, 2001.
Wang, S., Boulard, T., Predicting the microclimate in a naturally ventilated plastic house in a Mediterranean climate., Journal of Agricultural Engineering Research, Vol. 75, No. 1, 2000,pp. 2738.
Young, P., Chotai, A., Data-based mechanistic modeling, forecasting and control., IEEE Control systems magazine, Vol. 21, No. 5, 2001, pp.1427.
Young, P. C., Lees, M. J., Chotai, A., Tych, W., Chalabi, Z. S., Modeling and PIP control of a glasshouse micro-climate., Control Engineering Practice, Vol. 2, No. 4, 1994, pp.591604.
Referencias
Bot, G. P. A., Greenhouse climate: from physical process to a dynamical model., Ph D. thesis, Agricultural University of Wageningen, Holland, 1983.
Cunha, J.B., De Moura Oliveira, J. P., Optimal management of greenhouse environments., EFITA Conference, 2003.
Cunha, J. B., Greenhouse climate models: An overview., EFITA Conference, 2003.
Cunha, J. B., Couto, C., Ruano, A. E., Real-time parameter estimation of dynamic temperature models for greeenhouse environmetal control., Control Engineering Practice, 1997 DOI: https://doi.org/10.1016/S1474-6670(17)44479-X
Ghoumari, M. Y. El., Optimización de la producción de un invernadero mediante control predictivo no lineal., Ph.D. thesis, Universidad Autónoma de Barcelona, Spain, 2003.
Herrero, J.M., Martínez, M., Blasco, X., Ramos, C., Rodríguez, S., Identificación paramétrica del modelo no lineal de un invernadero mediante algoritmos genéticos., XXIV Jornadas de Automática, 2003.
Kania, S. Giacomelli, G., Solar radiation availability for plant growth in Arizona controlled environment agriculture systems., Proc. 30th National agricultural plastics congress, 2002.
Körner, O., Crop based climate regimes for energy saving in greenhouse cultivation., PhD thesis, Agricultural University of Wageningen, Holland, 2003.
Körner, O., Challa, H., Temperature integration and process based humidity control in chrysanthemum., Computers and electronics in agriculture, No. 43,2004, pp. 1–21. DOI: https://doi.org/10.1016/j.compag.2003.08.003
Overchee, V., Moor, B. L., Subspace identification for linear systems., Kluwer Academic Publishers, Dordrecht, Holland, 1996.
Molina-Aiz, F., Valera, D., Alvarez, A., Measurement and simulation of climate inside Almeria-type greenhouses using computational fluid dynamics., Agricultural and Forest Meteorology, No. 125, 2004, pp. 33-51. DOI: https://doi.org/10.1016/j.agrformet.2004.03.009
Piñon, S., Peña, M., Álvarez, h., Kuchen, B., Control predictivo con restricciones para el clima de un invernáculo., DYNA, Revista de la Facultad de Minas de la Universidad Nacional de Colombia, No. 135, 2002, pp.11–25.
Salgado, P., Cunha, J. B., Greenhouse climate hierarchical fuzzy modeling., Control Engineering Practice, No. 13, 2005, pp. 613–628. DOI: https://doi.org/10.1016/j.conengprac.2004.05.007
Tap, R.F., van Willigenburg, L. G., van Straten, G., Experimental results of receding horizon optimal control of greenhouse climate., Proc. Math. and Contr. Applic. in Agric. and Hort, No. 406,1996, pp. 229–238. DOI: https://doi.org/10.17660/ActaHortic.1996.406.23
Triguia, M., Barringtona, S., Gauthierb, L., A strategy for greenhouse climate control, part I: Model development., Journal of Agricultural Engineering Research, 2001.
Wang, S., Boulard, T., Predicting the microclimate in a naturally ventilated plastic house in a Mediterranean climate., Journal of Agricultural Engineering Research, Vol. 75, No. 1, 2000, pp. 27–38. DOI: https://doi.org/10.1006/jaer.1999.0482
Young, P., Chotai, A., Data-based mechanistic modeling, forecasting and control., IEEE Control systems magazine, Vol. 21, No. 5, 2001, pp.14–27. DOI: https://doi.org/10.1109/37.954517
Young, P. C., Lees, M. J., Chotai, A., Tych, W., Chalabi, Z. S., Modeling and PIP control of a glasshouse micro-climate., Control Engineering Practice, Vol. 2, No. 4, 1994, pp.591–604. DOI: https://doi.org/10.1016/0967-0661(94)90003-5
Cómo citar
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Descargar cita
CrossRef Cited-by
1. Alfonso Pérez-González, Ofelia Begovich-Mendoza, Javier Ruiz-León. (2018). Modeling of a greenhouse prototype using PSO and differential evolution algorithms based on a real-time LabView™ application. Applied Soft Computing, 62, p.86. https://doi.org/10.1016/j.asoc.2017.10.023.
Dimensions
PlumX
Visitas a la página del resumen del artículo
Descargas




Licencia
Derechos de autor 2010 Fredy Orlando Ruiz Palacios, Carlos Eduardo Cotrino Badillo

Esta obra está bajo una licencia internacional Creative Commons Atribución 4.0.
Los autores o titulares del derecho de autor de cada artículo confieren a la revista Ingeniería e Investigación de la Universidad Nacional de Colombia una autorización no exclusiva, limitada y gratuita sobre el artículo que una vez evaluado y aprobado se envía para su posterior publicación ajustándose a las siguientes características:
1. Se remite la versión corregida de acuerdo con las sugerencias de los evaluadores y se aclara que el artículo mencionado se trata de un documento inédito sobre el que se tienen los derechos que se autorizan y se asume total responsabilidad por el contenido de su obra ante la revista Ingeniería e Investigación, la Universidad Nacional de Colombia y ante terceros.
2. La autorización conferida a la revista estará vigente a partir de la fecha en que se incluye en el volumen y número respectivo de la revista Ingeniería e Investigación en el Sistema Open Journal Systems y en la página principal de la revista (https://revistas.unal.edu.co/index.php/ingeinv), así como en las diferentes bases e índices de datos en que se encuentra indexada la publicación.
3. Los autores autorizan a la revista Ingeniería e Investigación de la Universidad Nacional de Colombia para publicar el documento en el formato en que sea requerido (impreso, digital, electrónico o cualquier otro conocido o por conocer) y autorizan a la revista Ingeniería e Investigación para incluir la obra en los índices y buscadores que estimen necesarios para promover su difusión.
4. Los autores aceptan que la autorización se hace a título gratuito, por lo tanto renuncian a recibir emolumento alguno por la publicación, distribución, comunicación pública y cualquier otro uso que se haga en los términos de la presente autorización.



















