


Published
Optimization of the linear quadratic regulator (LQR) control quarter car suspension system using genetic algorithm
DOI:
https://doi.org/10.15446/ing.investig.v36n1.49253Keywords:
Genetic algorithm (GA), MacPherson strut, quarter car, linear quadratic regulator (LQR), optimization. (en)In this paper, a genetic algorithm (GA) based in an optimization approach is presented in order to search the optimum weighting matrix parameters of a linear quadratic regulator (LQR). A Macpherson strut quarter car suspension system is implemented for ride control application. Initially, the GA is implemented with the objective of minimizing root mean square (RMS) controller force. For single objective optimization, RMS controller force is reduced by 20.42% with slight increase in RMS sprung mass acceleration. Trade-off is observed between controller force and sprung mass acceleration. Further, an analysis is extended to multi-objective optimization with objectives such as minimization of RMS controller force and RMS sprung mass acceleration and minimization of RMS controller force, RMS sprung mass acceleration and suspension space deflection. For multi-objective optimization, Pareto-front gives flexibility in order to choose the optimum solution as per designer’s need.
Optimization of the linear quadratic regulator
(LQR) control quarter car suspension system
using genetic algorithm
Optimización del regulador lineal cuadrático (LQR)
del sistema de control de suspensión de coche usando
el algoritmo genético
M. P. Nagarkar1, and G. J. Vikhe2
1M. P. Nagarkar: Masters in Mechanical Engineer, SCSM College of Engineering, India.PhD Dept., AVCoE, Sangamner, India. Email: maheshnagarkar@rediffmail.com.
2G. J. VikhePatil: Principal, AVCoE, Sangamner, India.
How to cite: Nagarkar, M. P., & Vikhe, G. J. (2016). Optimization of the linear quadratic regulator (LQR) control quarter car suspension system using genetic algorithm. Ingeniería e Investigación, 36(1), 23-30.
ABSTRACT
In this paper, a genetic algorithm (GA) based in an optimization approach is presented in order to search the optimum weighting matrix parameters of a linear quadratic regulator (LQR). A Macpherson strut quarter car suspension system is implemented for ride control application. Initially, the GA is implemented with the objective of minimizing root mean square (RMS) controller force. For single objective optimization, RMS controller force is reduced by 20.42 % with slight increase in RMS sprung mass acceleration. Trade-off is observed between controller force and sprung mass acceleration. Further, an analysis is extended to multi-objective optimization with objectives such as minimization of RMS controller force and RMS sprung mass acceleration and minimization of RMS controller force, RMS sprung mass acceleration and suspension space deflection. For multi-objective optimization, Pareto-front gives flexibility in order to choose the optimum solution as per designer’s need.
Keywords: Genetic algorithm (GA), MacPherson strut, quarter car, linear quadratic regulator (LQR), optimization.
RESUMEN
En este artículo se presenta un algoritmo genético (GA) basado en un enfoque de optimización con el fin de encontrar los parámetros de la matriz de ponderación del regulador lineal cuadrático (LQR). Se implementa un sistema de suspensión Macpherson para la aplicación del control de amortiguación. Inicialmente el GA se implementa con el objetivo de minimizar la raíz cuadrada media (RMS) del controlador de fuerza. Para la optimización de un único objetivo, el controlador RMS de la fuerza se reduce en un 20,42 % con un ligero aumento en la aceleración RMS de la masa suspendida. Se observa equilibrio entre el control de fuerza y la aceleración de la masa suspendida. Además, el análisis se extiende a la optimización multiobjetivo con objetivos como la minimización del control RMS de la fuerza y de la aceleración debida a la masa suspendida y la minimización del control RMS de la fuerza, RMS surgida por la aceleración de la masa y la deflexión del espacio de la suspensión. Para la optimización multiobjetivo el Pareto-frontal facilita elegir la solución óptima según la necesidad del diseñador.
Palabras clave: Algoritmo genético (AG), suspensión MacPherson, cuarto de coche, regulador lineal cuadrático (LQR), optimización.
Received: February 19th 2015
Accepted: June8th 2015
Introduction
Automobile suspension systems have been widely applied to vehicles from horse drawn carriages with flexible leaf springs to modern automobiles. The primary function of the suspension system is to isolate the passengers from vibrations due to road unevenness. A passive suspension system consists of conventional springs and dampers with a fixed spring rate and damping parameters. It has conflicting requirements between ride comfort and vehicle handling. It has no mechanism of feedback control. The active suspension system replaces the classical passive elements by a controlled system, which can supply external force to the system (Fuller, 1996). Various mathematical models for suspension systems have been presented by researchers to ride and control applications. A 2 degrees of freedom (DoF) quarter car suspension system was implemented by various researchers(Yahaya et al.,2000; Elmadany and Al-Majed 2001; Assadian, 2002; Tueest et al., 2009; Darus and Enzai, 2010; Nekoui and Hadavi, 2010; Isamil et al., 2012). The suspension system is modeled as lumped masses and linear springs and dampers. In this study, a 2 DoF Macpherson strut suspension model is implemented for control application.
LQR control is an optimal control method with quadratic performance indexes. LQR is simple and can achieve closed loop optimal control with linear state feedback or output feedback. In designing an LQR controller, the selection of weighting matrices is a key issue which directly affects the control effort. An LQR problem is presented with full state feedback for suspension system. The weighting constants ql, q2, q3, and ρ, used to calculate matrices Q and R, were selected based on the designer’s preferences (Elamdany and Al-Majed, 2001). The LQR control scheme to control an actuator in an active suspension system was presented where the critical issue was to select the weight matrices which in turn determine the system performance. The values of weighting matrices were selected for simulation (Yahaya et al., 2000; Zhen et al., 2006).
Yoon et al. had presented an application of optimal control law via an LQR control method for controlling altitude of the tri-rotor UAV. The system consists of a linearized analytical model of single tilt dynamics based on force and moment dynamics. To design an LQR control, a linearized model is assumed. In the designing process, Q and R matrices are chosen to regulate roll, pitch and yaw angles. Flight tests such as the hovering test, altitude test and yaw control tests are conducted. Authors had successfully demonstrated fast yaw control motion using LQR based attitude controller (Yoon et al., 2013). An approach to a LQR problem with an objective to translate the system’s performance objectives into the cost function parameters was presented (Oral et al., 2010). The selection of the elements of the performance index matrices, Q and R, was not carried out by trial and error but calculated for time domain design, which specifies steady and transient response of the system. The ratio between the weighting parameters was obtained using the mathematical relations. But, for minimum oscillations, the weighting parameters need to be adjusted.
Either LQR weight matrices were arbitrarily chosen by the authors for ride control application (Yahaya et al., 2000; Zhen et al., 2006; Tusset et al. 2009; Darus and Enzai, 2010; Nekoui and Hadavi, 2010; Hsabullah and Faris, 2010; Ismail et al., 2012) or the weight matrices parameters of a LQR controller were adjusted by trial and error until desired performance was achieved (Oral et al., 2010).
A LQR control of a 2 DoF Macpherson strut quarter car active suspension system is presented in this paper. The Genetic Algorithm search technique is implemented for optimum selection of weight matrices. Initially, minimization of RMS controller force objective is used for optimization. Minimum controller force means minimum energy expenditure. GA is implemented to search the optimum weighting matrices, Q and R, parameters. The study is further extended to multi-objective optimization. In multi-objective optimization, two objective functions are initially used viz. RMS controller force and RMS sprung mass acceleration. Minimization of RMS sprung mass acceleration leads to better ride comfort. Further, third objective function is added as suspension space. Due to multi-objective nature of LQR control action and objective are conflicting; the key issue is to select the weight matrices of LQR controller so as to fulfill these requirements. The trial and error method or arbitrarily choosing the weight matrices is cumbersome and time consuming. Hence, the GA based search technique is implemented to search the optimum weight matrices parameters. Macpherson strut suspension system is simulated in Matlab/Simulink® environment. The output is fed to the optimization algorithm to determine objectives and check the constraints. This optimization process is iteratively repeated until optimization stopping criterion is reached. In this paper, number of generations is used as an optimization stopping criterion. For multi-objective optimization, trade-off front is obtained, which gives more flexibility to designers to choose solution.
Macpherson Strut Quarter Car Model
The Macpherson suspension was created by Earl Macpherson in 1949 for the Ford Company. This type of suspension is widely used in vehicles as it is compact size and light weight.
A model of the Macpherson strut suspension with spindle properties developed by Hong et al.(1999) was implemented for ride control applications The schematic of a Macpherson strut suspension is shown in Figure 1.
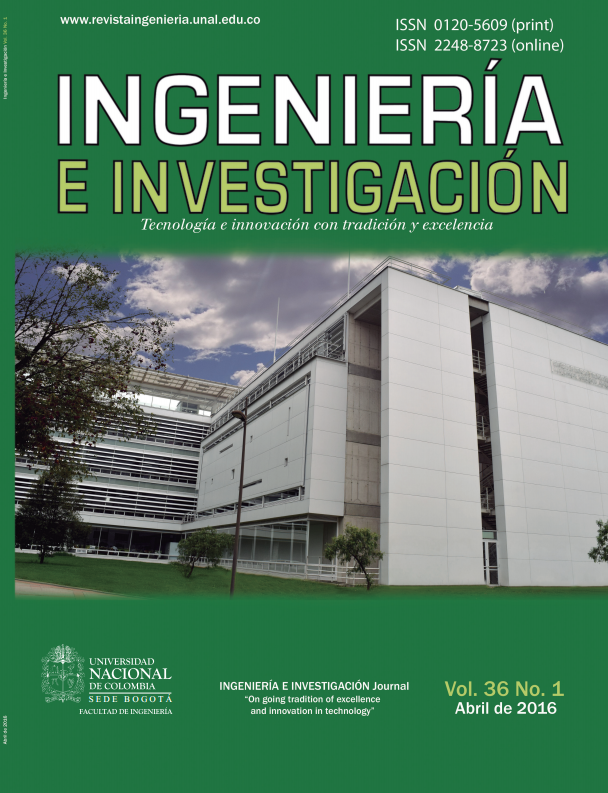
Equation of Motion for Macpherson Strut Model (16)
 (1)
(1)

Figure 1. Macpherson strut quarter car model (Hong et al. 1999)
Where ms and mus sprung mass and unsprung mass in kg, ks and kt suspension spring stiffness and tyre stiffness in N/m, cs suspension damping coefficient in Ns/m,  ,
,  , and
, and  sprung mass displacement in m, velocity in m/s and acceleration in m/s2 respectively, xr road roughness in m, lA, lB, and lC distance from O to A, O to B, control arm length in m respectively, θ and θ0 rotation angle of control arm and initial angular displacement of control arm, α angle made by link OA with horizontal,
sprung mass displacement in m, velocity in m/s and acceleration in m/s2 respectively, xr road roughness in m, lA, lB, and lC distance from O to A, O to B, control arm length in m respectively, θ and θ0 rotation angle of control arm and initial angular displacement of control arm, α angle made by link OA with horizontal,
 ,
,  ,
, 
 ,
,
For linearization the state variables are  and output as . Linearization of Equation (1) is carried out at an equilibrium point (0,0, θ0,0)(Hong et al., 1999).
and output as . Linearization of Equation (1) is carried out at an equilibrium point (0,0, θ0,0)(Hong et al., 1999).
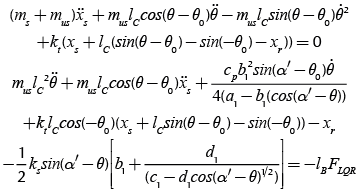
The linearization equation is (for details(Hong et al., 1999)):
 (2)
(2)
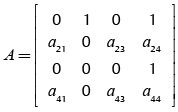
and output equation
 (3)
(3)
where (A) is System matrix, and (B1), (B2) Control Input Matrix and Disturbance Matrix.
 ,
, ,
,
 ,
,
 ,
, 
 ,
,
 ,
,
 .
.

LQR Controller
The LQR problem is a regulator problem using a linear system with a quadratic cost function. The LQR is an optimal control method for the linear system.
Let us consider the system described in Equation (2). Consider a state variable feedback regulator;
 (4)
(4)
where fLQR is the LQR control force in N, KLQR the state feedback gain matrix, and x the state vector.
The design procedure consists of determining the control input fLQR, which minimizes the performance index. The performance index JLQR represents the performance characteristic requirement as well as the controller input limitation (Anderson and Moore, 1990; Ogata, 2002). In LQR, the quadratic performance index is expressed as:
 (5)
(5)
where matrices Q and R are positive-definite (or positive-semi definite) Hermitian or real symmetric matrices and are known as weighting matrices.
The first term on the right-hand side of the Equation (5) accounts for the error and second term accounts for the expenditure of the energy of the control signal. Matrices Q and R determine the relative importance of the error and expenditure of the performance index. (For details refer to (Ogata, 2002)).
Gain matrix KLQR, which minimizes JLQR is:
 (6)
(6)
where P is the positive definite matrix.
Genetic Algorithm
The genetic algorithm is an optimization and global search technique invented by Holland (1975, 1992). This technique uses the principle of genetics and natural selection. As random numbers are generated during the operation of genetic algorithms, GAs are stochastic algorithms. These random numbers generated determine the search result (Holland, 1975, 1992).
Yang et al. presented a GA based hybrid method of optimization for constrained optimization. This hybrid method combines the chaotic initialization method, improved boundary simulation and the GA. Backward binary search was implemented in the improved boundary initialization method for feasible boundary region. Author, along with bench mark function, presented three engineering problems with single objective function along with constraints (Yang et al., 2013). However, the suspension control problem is of multi-objective nature with constraints.
The GA method is described as follows:
Population: The optimization process starts with an initial population or initial set also called as first generation. First generation is created by using random chosen designs.
Selection: The objective function evaluates and then rates each solution in terms of fitness. All genes will be checked to satisfy design constraints. The fitness is numeric value represents the probability of survival. Selection is performed on the population by keeping the solutions with best fitness value. The genes having best fitness vales (i.e. minimum RMS LQR controller force or RMS sprung mass acceleration) are selected.
The optimization algorithm is an iterative process. Using operators such as cross-over operator, mutation operator, new generation is created. Genes having better fitness are allowed to survive and carried forward in next generations. Algorithm steps are repeated till some convergence criterion or number of generations or fitness or CPU time is reached.
Multi-Objective Optimization
Nature of objective functions (like controller force, sprung mass acceleration and suspension space requirement) is conflicting, so multi-objective optimization using NGPM (Song, 2011, 2014) (A NSGA-II Program in Matlab) is carried out (Deb et al., 2002).
Problem Statement
The main objective of this paper is to search optimum weighting parameters of Q and R matrices of a LQR controller to minimize the controller force. Hence RMS controller force is chosen as one of the optimization criterion.
RMS Controller Force – It is expressed as:
 (7)
(7)
where N is the number of sample points.
While designing a suspension system, performance parameters which are under considerations are ride comfort, suspension travel (or rattle space). The ride comfort is characterized by the RMS sprung mass acceleration, and the suspension travel is characterized by the relative travel between sprung mass and unsprung mass.
Hence, RMS sprung mass acceleration and maximum suspension travel are considered as objective functions for multi-objective optimization.
RMS Sprung mass acceleration is expressed as:
 (8)
(8)
Suspension space requirement is attained by minimizing the maximum travel of suspension. Suspension working space is the distance between the car body and the tire,
 (9)
(9)
As per ISO 2631 (ISO, 1997), if RMS sprung mass acceleration is below 0.315 m/s2, passengers feel highly comfortable. At least 0.127 m of suspension travel is required and the maximum sprung mass acceleration should not increase 4.5 m/s2 so as to avoid hitting the suspension stops (Baumal et al., 1998).
RMS sprung mass acceleration, maximum sprung mass acceleration and suspension travel are the constraints for optimization.
The formulation of optimization problem is:
- Case I: Single objective optimization
fobj = Minimize (RMS fLQR )
- Case II: Multi objective optimization (2 Objectives)
fobj1 = Minimize (RMS fLQR )
fobj2 = Minimize (RMS arms )
- Case III: Multi objective optimization (3 Objectives)
fobj1 = Minimize (RMS fLQR )
fobj2 = Minimize (RMS arms )
fobj3 = Minimize (max(Suspension Travel))
Three optimization cases are subject to constraints:
 ,
, ,
,
Genetic Algorithm Parameters
Population: 100, Generations: 100, Selection: Tournament
Mutation: 0.5 %, Crossover fraction: 55 %,Crossover: Single point
Search Space for Q and R Matrices
Depending upon the weight matrices Q and R, the system will exhibit a different response. The selection of larger values of Q, to keep small JLQR, will result in smaller values of state x and thus state decays faster to zero (Levine W, 2010).
1009 ≤ Q11≤ 1011, 103≤ Q22≤ 1006, 10-2≤ Q33≤ 101, 10-2≤ Q44≤ 101, 10-3≤ R1≤ 10-1
Results and Discussions
The LQR controller and GA based LQR controllers are simulated in Matlab® environment.
Quarter car parameters:
ms= 453 kg mus = 71 kg
ks = 17658 N/m cs = 1950 N.sec/m kt = 183887 N/m
lA = 0.66 m, lB = 0.34 m, lC = 0.37 m, α = 74˚, θ0 = -2˚
Input road condition is modeled as class E road. Refer to Figure 2.

Figure 2. Road profile (Class E, Velocity 80 kmph)
The degree of road roughness is 4096 × 10-6 m2/(cycle/m) (Zhang et al., 2007). The Vehicle is travelling with a speed of 80 km/h.
Single Objective Optimization
The primary objective of controller design is to minimize the controller force by searching optimum weighting parameters of a LQR controller using GA. This is attained by minimizing the RMS value of controller force, which leads to a lower amount of controller force supplied to the active suspension system in order to minimize acceleration values experienced by the passengers.
The RMS value of controller force is 76.4657 N. The convergence of objective function is shown in Figure 3. RMS controller force is observed to be constant after the 40th generation.
From Figure 4 and Table 1, for single objective optimization, RMS controller force is reduced by 20.42 %, whereas a slight increase in RMS sprung mass acceleration is observed (3.65 %) when compared to an un-optimized LQR controller.
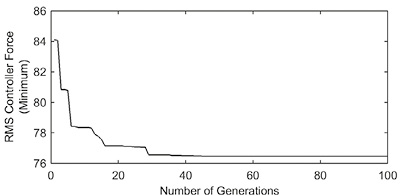
Figure 3. RMS controller force at each generation (Population: 100).

Figure 4. Quarter car response for single objective optimization
Multi Objective Optimization
The vehicle active suspension system has to fulfill some conflicting criterion such as minimum controller force, ride comfort and suspension space requirement. Ride comfort is attained by minimizing the RMS sprung mass acceleration.
The following cases of multi-objective optimization are studied:
RMS controller force and RMS sprung mass acceleration.
RMS controller force and RMS sprung mass acceleration and maximum suspension working space.
Figure 5 shows the pareto front of multi-objective optimization of RMS controller force and RMS sprung mass acceleration. The pareto front has the concave portion. The trade-off between controller force and sprung mass acceleration can be clearly observed in Figure 5. In this situation the designer has to make the decision of selecting final values of weighting matrices.
For multi-objective optimization, there are three cases of example. Cases I, II and III, as shown in Figure 5, are selected to be studied. Figure 6 shows sprung mass acceleration, suspension space and controller force for Cases I, II and III.
From Figure 6 and Table 1, regarding Case I, the RMS controller force is decreased by 19.6 % and the maximum controller force is also reduced by 17.8 %, while a slight increase in RMS sprung mass acceleration (3.5 %) is observed when compared to an un-optimized LQR controller. For Case II, the RMS controller force is increased by 158.95 %, while the RMS sprung mass acceleration is reduced by 33 %. In Case III, the RMS sprung mass acceleration is reduced by 55.38 % whereas the RMS controller force is increased by 395.21 %.Due to trade-off, it is the designer’s decision to choose parameters as per requirement.

Figure 5. Pareto front – Two objectives.
Figure 7 shows the pareto front of multi-objective optimization of RMS controller force, RMS sprung mass acceleration and maximum suspension space requirement. In this type of multi-objective optimization, there are three cases of example. Cases IV, V and VI, as shown in Figure 7, are selected to be studied. Figure 8 shows controller force, sprung mass acceleration and suspension space for Cases IV, V and VI.
From Figure 8 and Table 1, for Case IV,the RMS controller force is decreased by 18.77 %, while a slight increase in RMS sprung mass acceleration (3.29 %) and a slight decrease in maximum suspension space deflection (3.53 %) is observed when compared to an un-optimized LQR controller. For Case V, the RMS controller force is increased by 145.16 % while the RMS sprung mass acceleration is reduced by 31.22 % and the maximum suspension space deflection is increased by 51.41 %. In Case VI, the RMS sprung mass acceleration is reduced by 56.11 %, whereas the RMS controller force is increased by 405.66 % and the maximum suspension space deflection is increased by 98.23 %.
A trade-off is observed between controller force and sprung mass acceleration and suspension space deflection. It is the designer’s decision to choose parameters as per requirement.
An optimal control of a linear 2 DoF vehicle suspension based on a simulated annealing (SA) optimization algorithm was presented by Meng et al. The LQR control weight matrices were searched using vertical acceleration of sprung mass, suspension space displacement and tyre displacement as objective functions.
A multi-objective optimization problem was converted into an uni-objective optimization problem using normalization. During simulation the vehicle was travelling over a class B road at 20 kmph speed. A sprung mass acceleration of 0.3326 m/ s2 and suspension space travel of 0.354843m was observed using SA optimized LQR control (Meng et al., 2014).

Figure 6. Response of quarter car model to Case I, II and III.
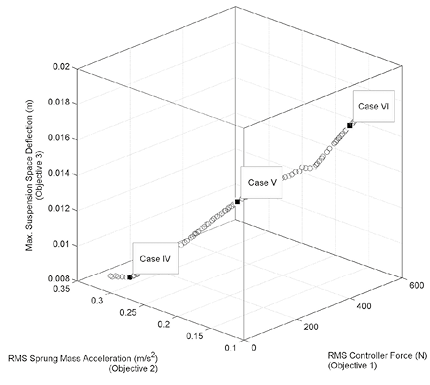
Figure 7. Pareto front -Three objectives.
A current GA based optimization technique incorporates multi-objective optimization. Current paper discusses optimization using Macpherson strut quarter car model travelling over class E road at 80 kmph speed. For validation, the GA optimized LQR control is compared with un-optimized LQR control. In multi-objective optimization, for Cases III and VI, an RMS sprung mass acceleration of 0.1355 and 0.1333 m/s2 is observed, respectively, which is less than 0.3326 m/s2 obtained by SA. In GA, a population of 100 genes is used; hence, a pareto front of 100 different solutions is obtained, which gives designers more flexibility. Additionally, GA is successfully implemented for a single objective, two objective and three objective optimization, thus showing robustness.

Figure 8. Response of quarter car model to Case IV, V and VI.
Table 1. Response of LQR and GA based LQR controller
|
Optimization Type |
RMS FLQR |
Fmax |
aRMS |
amax |
Suspension |
|
Un-optimized |
96.0892 |
323.5891 |
0.3037 |
0.9146 |
0.0085 |
|
Single objective |
76.4657 |
263.4127 |
0.3148 |
0.9974 |
0.0083 |
|
Case I |
77.2579 |
265.9790 |
0.3144 |
0.9941 |
0.0083 |
|
Case II |
248.8203 |
716.5896 |
0.2033 |
0.5678 |
0.0131 |
|
Case III |
475.8472 |
1289.662 |
0.1355 |
0.3685 |
0.0166 |
|
Case IV |
78.0496 |
268.3454 |
0.3137 |
0.9905 |
0.00828 |
|
Case V |
235.5755 |
684.2633 |
0.2089 |
0.5841 |
0.01287 |
|
Case VI |
485.8867 |
1313.626 |
0.1333 |
0.3632 |
0.01685 |
Conclusion
The work presents optimization of weighting matrices of the LQR controller. A Macpherson strut quarter car suspension model is used for control application.
1. Instead of trial and error or adjusting the weighting matrix parameters of the LQR controller, a GA based method is proposed to determine the parameters to set an objective or objectives.
2. Single objective optimization is successfully achieved using GA optimization to minimize the controller force. In single objective optimization, the controller force is reduced by 20.42 % with slight increase of 3.65 % in sprung mass acceleration.
3. Multi-objective optimization with two objectives and three objectives has been successfully implemented to search for optimum weighting parameters of the LQR controller.
4. Multi-objective optimization with two objectives, RMS controller force and RMS sprung mass acceleration, is successfully implemented using GA. Cases I, II and III are studied from pareto front. A trade-off is observed between controller force and sprung mass acceleration. In this case the designer generally chooses Case-II, which lies in the central region of the pareto front.
5. GA optimization with three objectives i.e. RMS controller force, RMS sprung mass acceleration and maximum deflection of suspension space is implemented using GA. Three cases, viz. IV, V and VI, are studied from pareto front. A trade-off is observed between controller force and sprung mass acceleration and suspension space requirements.
6. In multi-objective optimization, as per the requirement, the designer has greater flexibility to choose the solution from the sets of solution from the pareto front.
References
Anderson,B. and Moore,J. (1990). Optimal control: linear quadratic methods. NJ: Prentice Hall.
Assadian,F. (2002)A comparative study of optimal linear controllers for vibration suppression. Journal of the Franklin Institute, 339,347–360. DOI: 10.1016/S0016-0032(01)00050-3.
Baumal,A.E., McPhee,J.J. and Calamai,P.H. (1998). Application of genetic algorithms to the design optimization of an active vehicle suspension system. Computer Methods in Applied Mechanics and Engineering, 163, 87-94. DOI: 10.1016/S0045-7825(98)00004-8.
Darus, R. and Enzai, N.I. (2010) Modeling and Control Active Suspension System for a Quarter Car Model. Proceedings of CSSR 2010, 1203-1206. DOI: 10.1109/CSSR.2010.5773718.
Deb,K., Pratap,A., Agarwal,S. and Meyarivan,T. (2002). A Fast and Elitist Multiobjective Genetic Algorithm: NSGA-II. IEEE Transactions on Evolutionary Computation, 6(2), 182-197, 2002. DOI:10.1109/4235.996017.
Elmadany,M. and Al-Majed,M. (2001).Quadratic Synthesis of Active Controls for a Quarter-Car Model. Journal of Vibration and Control, 7, 1237-1252.
DOI: 10.1177/107754630100700806
Fuller, C. R., Elliott, S.J.and Nelson, P.A. (1996). Journal of Vibration and Control. London: Academic Press London.
Hasbullah,F. and Faris,W. (2010). A comparative Analysis of LQR and Fuzzy Logic Controller for Active Suspension Using Half Car Model, Proceedings of 11th Int. Conf. Control, Automation, Ro-botics and Vision, 2416-2420.
DOI:10.1109/ICARCV.2010.5707260.
Holland,J.H. (1975). Adaptation in Natural and Artificial Systems. University of Michigan Press.
Holland,J.H. (1992). Genetic Algorithms.Scientific American, Genetic Algorithms.
Hong,K.S., Jeon,D.S., Yoo,W.S., Sunwoo,H., Shin,S.Y., Kim,C.M. and Park,B.S. (1999). A New Model and an Optimal Pole-Placement Control of the Macpherson Suspension System. SAE Technical Pa-per 1999-01-1331, 1-10.
DOI:10.4271/1999-01-1331.
Ismail,M., Peng,K., Hamzah,N., Sam,Y., Aripin, M., and Hasan,M. (2012). A Linear Model of Quarter Car Active Suspension System Using Composite Nonlinear Feedback Control. Proceedings of IEEE Student Conference on Research and Development, 98-103.
DOI:10.1109/SCOReD.2012.6518619.
ISO: 2631-1. (1997). Mechanical vibration and shock - Evaluation of human exposure to whole-body vibration.
Levine, W. (2010). The control handbook. CRC Press.
Meng, J., Chen, Q., and He, R. (2014). Research on optimal control for the vehicle suspension based on simulated annealing algorithm. Journal of Applied Mathematics, 2014, 1-5.
Nekoui,M. and Hadavi, P. (2010). Optimal Control of an Active Suspension System. Proceedings of 14th EPE-PEMC, T5-60-T5-63. DOI:10.1109/EPEPEMC.2010.5606776.
Ogata, K. (2002). Modern Control Engineering. New Delhi: Prentice Hall.
Oral, Ö. Çetin,L., Uyar,E. (2010). A novel method on selection of Q & R matrices in the theory of optimal control. International Journal of Systems Control,, 1(2), 84-92.
Song,L. NGPM-A NSGA-II. (2011). Program in Matlab. User Manual. Version 4.1, pp. 1-20.
Song,L. NGPM-A NSGA-II. (2014). Program in Matlab v14. Matlab Code. http://www.mathworks.com/matlabcentral/fileexchange. Accessed 14 January 2014.
Tusset, A., Rafikov,M., Balthazar,J. (2009). An Intelligent Controller Design for Magnetorheological Damper Based on a Quarter-car Model. Journal of Vibration and Control, 15(12), 1970-1920.
DOI:10.1177/1077546309102677.
Yahaya,M.S., Ruddin,M., Ghani,A. and Ahmad, N. (2000). LQR Controller for Active Car Suspension. Proceedings of TENCON, 441-444. DOI:10.1109/TENCON.2000.893707.
Yang, J., Gao, H. and Lui, W. (2015). Hybrid Method of Chaotic Genetic Algorithm and Boundary Simulation for Constrained Optimization. International Journal of Innovative Computing, Information and Control, 11(3), 1059-1073.
Yoon, S., Lee, S., Lee, B., Kim, C., Lee, Y., and Sung, S. (2013). Design and Flight Test of a Small Tri-Rotor Unmanned Vehicle with a LQR Based Onboard Attitude Control System. International Journal of Innovative Computing, Information and Control, 9(6), 2347-2360.
Zhang,Y., Chen,W., Chen,L. and Shangguan,W. (2007). Non-stationary Random Vibration Analysis of Vehicle with Fractional Damping. Proceedings of 13th National Conference on Mecha-nisms and Machines (NaCoMM07), 171-178.
Zhen,L., Luo, C. and Hu,D. (2006). Active Suspension Control Design Using a Combination of LQR and Backstepping. Proceedings of the 25th Chinese Control Conference, 123-125. DOI:10.1109/CHICC.2006280612.

How to Cite
APA
ACM
ACS
ABNT
Chicago
Harvard
IEEE
MLA
Turabian
Vancouver
Download Citation
CrossRef Cited-by
1. Khizar Qureshi, Ramiro Liscano, Yuping He. (2022). Optimization of Gain Scheduled Controller for an Active Trailer Steering System Using an Evolutionary Algorithm. Machines, 10(11), p.1019. https://doi.org/10.3390/machines10111019.
2. Nitish, Amit Kumar Singh. (2025). Design of enhanced active suspension system with metaheuristic-based LQG control and ANFIS-based actuation. Mechanics Based Design of Structures and Machines, 53(9), p.6196. https://doi.org/10.1080/15397734.2025.2480442.
3. Alexandre de Macêdo Wahrhaftig, Cibele Mota Menezes, Rodrigo Oliveira da Silva Conceiçao, Iago Goncalves de Oliveira, Ozge Ozdemir. (2024). Assessment of a hydraulic bottle jack as an effective device for controlling vibration and mitigating the effects of earthquakes. Journal of Low Frequency Noise, Vibration and Active Control, 43(1), p.543. https://doi.org/10.1177/14613484231198969.
4. Khizar Quresh, Shahryar Rahnamayan, Yuping He, Ramiro Liscano. (2019). Enhancing LQR Controller Using Optimized Real-time System by GDE3 and NSGA-II Algorithms and Comparing with Conventional Method. 2019 IEEE Congress on Evolutionary Computation (CEC). , p.2074. https://doi.org/10.1109/CEC.2019.8789894.
5. Usman Mohammed, Tologon Karataev, Omotayo Oshiga, Oghorada Oghenewvogaga. (2024). Comprehensive Review of Metaheuristic Algorithms (MAs) for Optimal Control (OCl) Improvement. Archives of Computational Methods in Engineering, 31(5), p.2785. https://doi.org/10.1007/s11831-023-10060-9.
6. Prabhat R. Mahto, Anil C. Mahato, Mukesh Sharma, Paritosh Mahata, Jay P. Tripathi. (2025). Various Vibration Harvesting Techniques for Rotating System: An Overview. Journal of Vibration Engineering & Technologies, 13(1) https://doi.org/10.1007/s42417-024-01712-6.
7. Maryam Amirmojahedi, Saeed Shojaee, Saleh Hamzehei‐Javaran. (2024). Application of optimized polynomial controllers based on Bayesian optimization and weight matrix adjustment. The Structural Design of Tall and Special Buildings, 33(18) https://doi.org/10.1002/tal.2184.
8. Belgacem Bekkar, Khale Ferkous. (2023). Design of Online Fuzzy Tuning LQR Controller Applied to Rotary Single Inverted Pendulum: Experimental Validation. Arabian Journal for Science and Engineering, 48(5), p.6957. https://doi.org/10.1007/s13369-022-06921-3.
9. Gustavo Mendes Platt, Marcelo Escobar Aragão, Fernanda Cabral Borges, Douglas Alves Goulart. (2020). Evaluation of a New Multimodal Optimization Algorithm in Fluid Phase Equilibrium Problems. Ingeniería e Investigación, 40(1), p.27. https://doi.org/10.15446/ing.investig.v40n1.78822.
10. Maryam Brahem, Mnaouar Chouchane. (2024). GA tuned LQR controller for active vibration control of a rotor bearing system using piezoelectric actuators. Engineering Research Express, 6(2), p.025562. https://doi.org/10.1088/2631-8695/ad5499.
11. Michiel Haemers, Stijn Derammelaere, Kurt Stockman. (2017). Co-design of controller and setup configuration using Genetic Algorithm. 2017 22nd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA). , p.1. https://doi.org/10.1109/ETFA.2017.8247698.
12. Nitish, Amit Kumar Singh. (2024). Metaheuristic tuned decentralized PID controller based active suspension system for railway vehicle. Expert Systems, https://doi.org/10.1111/exsy.13695.
13. Cheng Lin, Shengxiong Sun, Paul Walker, Nong Zhang. (2017). Off-Line Optimization Based Active Control of Torsional Oscillation for Electric Vehicle Drivetrain. Applied Sciences, 7(12), p.1261. https://doi.org/10.3390/app7121261.
14. D Erceg, Z Grahovac, B Z Knezevic. (2023). Control algorithm of the unstable 3DOF system. Journal of Physics: Conference Series, 2540(1), p.012006. https://doi.org/10.1088/1742-6596/2540/1/012006.
15. Volodymyr Kapustyan, Anna Sukretna, Zhanna Chernousova, Yuriy Kharkevych. (2026). Critical Problem of Optimal Stabilization Without Control Constraints. Axioms, 15(6), p.436. https://doi.org/10.3390/axioms15060436.
16. Sohaibullah Zarghoon, Samuel Emebu, Radek Matušů, Cyril Belavý, Lukáš Bartalský, Stanislav Ďuriš, Sabir Husnain, Clara Mendoza Martinez. (2024). Full-state feedback LQR with integral gain for control of induction heating of steel billet. Engineering Science and Technology, an International Journal, 55, p.101721. https://doi.org/10.1016/j.jestch.2024.101721.
17. Pingping Zhao, Zhimin Fan. (2023). Optimisation of electric vehicle with the in-wheel motor as a dynamic vibration absorber considering ride comfort and motor vibration based on particle swarm algorithm. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 237(1), p.49. https://doi.org/10.1177/14644193221143594.
18. Xingchen Zhu, Jifu Guan, Rubai Yang. (2025). Robust optimal sliding mode control of single chamber semi-active hydro-pneumatic suspension. 2025 5th International Conference on Electrical, Computer and Energy Technologies (ICECET). , p.1. https://doi.org/10.1109/ICECET63943.2025.11472097.
19. Alexander Semion, Anna Presnova. (2022). Optimal Control of Car Active Suspension Control under Delays. 2022 16th International Conference on Stability and Oscillations of Nonlinear Control Systems (Pyatnitskiy's Conference). , p.1. https://doi.org/10.1109/STAB54858.2022.9807521.
Dimensions
PlumX
Article abstract page views
Downloads




License
Copyright (c) 2016 Mahesh Nagarkar, G. J. Vikhe Patil

This work is licensed under a Creative Commons Attribution 4.0 International License.
The authors or holders of the copyright for each article hereby confer exclusive, limited and free authorization on the Universidad Nacional de Colombia's journal Ingeniería e Investigación concerning the aforementioned article which, once it has been evaluated and approved, will be submitted for publication, in line with the following items:
1. The version which has been corrected according to the evaluators' suggestions will be remitted and it will be made clear whether the aforementioned article is an unedited document regarding which the rights to be authorized are held and total responsibility will be assumed by the authors for the content of the work being submitted to Ingeniería e Investigación, the Universidad Nacional de Colombia and third-parties;
2. The authorization conferred on the journal will come into force from the date on which it is included in the respective volume and issue of Ingeniería e Investigación in the Open Journal Systems and on the journal's main page (https://revistas.unal.edu.co/index.php/ingeinv), as well as in different databases and indices in which the publication is indexed;
3. The authors authorize the Universidad Nacional de Colombia's journal Ingeniería e Investigación to publish the document in whatever required format (printed, digital, electronic or whatsoever known or yet to be discovered form) and authorize Ingeniería e Investigación to include the work in any indices and/or search engines deemed necessary for promoting its diffusion;
4. The authors accept that such authorization is given free of charge and they, therefore, waive any right to receive remuneration from the publication, distribution, public communication and any use whatsoever referred to in the terms of this authorization.




















